


















5 - 85
Chapter 5 Data Used for Positioning Control
Item
Setting value
Default
value
Buffer memory address
Value set with GX Works2 Value set with sequence program
QD77MS2
QD77MS4
QD77MS16
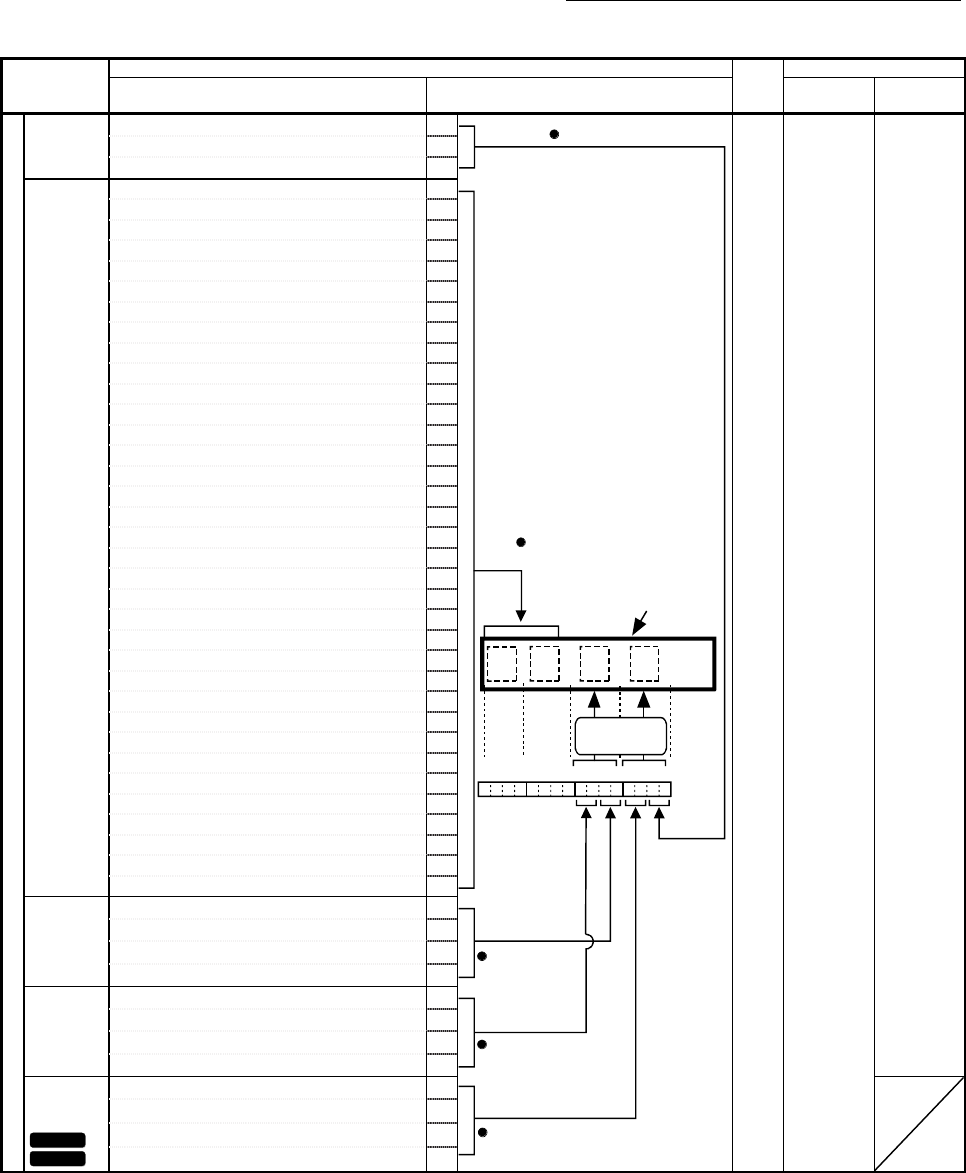
Positioning identifier
[Da.1]
Operation
pattern
00: Positioning complete 00
Operation pattern
b15
Setting value
Control system
H
b12 b8 b4 b0
Convert into
hexadecimal
Acceleration
time
Deceleration time
Axis to be interpolated
(
in 2-axis interpolation onl
y)
0000H 2000+6000n
6000+1000n
01: Continuous positioning control 01
11: C ontinuou s path control 11
[Da.2]
Control
system
01h : ABS Linear 1 01
H
02h : INC Linear 1 02H
03h : Feed 1 03H
04h : FWD V1 04H
05h : RVS V1 05H
06h : FWD V/P 06H
07h : RVS V/P 07H
08h : FWD P/V 08H
09h : RVS P/V 09H
0Ah : ABS Linear 2 0AH
0Bh : INC Linear 2 0BH
0Ch : Feed 2 0CH
0Dh : ABS ArcMP 0DH
0Eh
: INC ArcMP 0EH
0Fh : ABS ArcRGT 0FH
10h : ABS ArcLFT 10H
11h : INC ArcRGT 11H
12h : INC ArcLFT 12H
13h : FWD V2 13H
14h : RVS V2 14H
15h : ABS Linear 3 15H
16h : INC Linear 3 16H
17h : Feed 3 17H
18h : FWD V3 18H
19h : RVS V3 19H
1Ah : ABS Linear 4 1AH
1Bh : INC Linear 4 1BH
1Ch : Feed 4 1CH
1Dh : FWD V4 1DH
1Eh : RVS V4 1EH
80h : NOP 80H
81h : Address CHG 81H
82h : JUMP 82H
83h : LOOP 83H
84h : LEND 84H
[Da.3]
Acceleration
time No.
0: [Pr.9]
Acceleration time 0 00
1: [Pr.25]
Acceleration time 1 01
2: [Pr.26]
Acceleration time 2 10
3: [Pr.27]
Acceleration time 3 11
[Da.4]
Deceleration
time No.
0: [Pr.10]
Deceleration time 0 00
1: [Pr.28]
Deceleration time 1 01
2: [Pr.29]
Deceleration time 2 10
3: [Pr.30]
Deceleration time 3 11
[Da.5]
Axis to be
interpolated
QD77MS2
QD77MS4
0: Axis 1 00
1: Axis 2 01
2: Axis 3 10
3: Axis 4 11
n: Axis No.-1