


















5 - 2
Chapter 5 Data Used for Positioning Control
5.1 Types of data
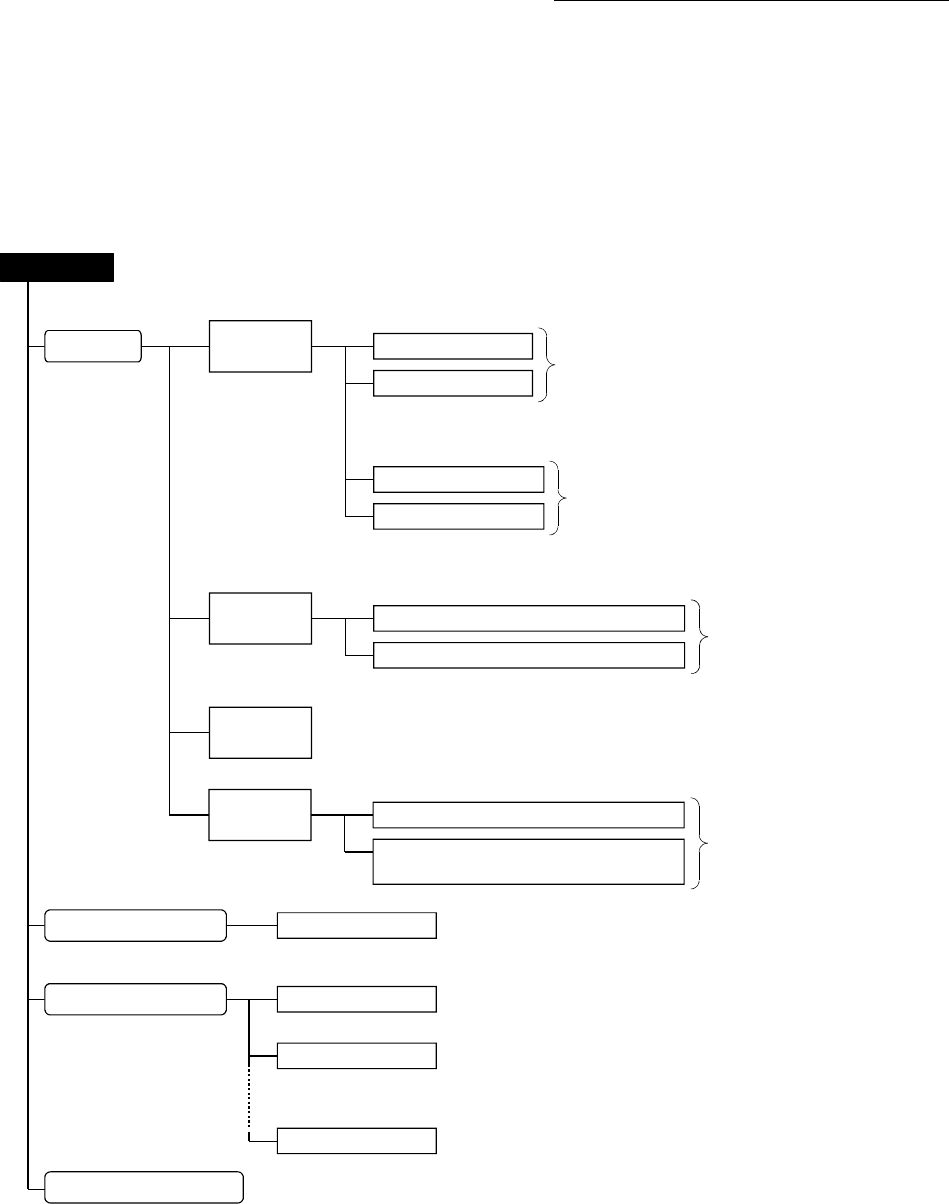
5.1.1 Parameters and data required for control
The parameters and data required to carry out control with the Simple Motion module
include the "setting data", "monitor data" and "control data" shown below.
Expansion
parameters
Set according to the system configuration when the system is started up.
OPR basic parameters
OPR detailed parameters
OPR
parameters
Set the values required for
carrying out OPR control.
(Data set beforehand according to the machine and application, and stored in the flash ROM or internal memory (nonvolatile).)
Parameters
Positioning
parameters
Detailed parameters 1
Detailed parameters 2
Set according to the system configuration when
the system is started up.
Note)
Detailed parameters 2 are data items for using the functions of Simple
Motion module to the fullest. Set as required.
Setting data
Basic parameters 1
Basic parameters 2
Note)
If the setting of the basic parameters 1 is incorrect, the rotation direction
may be reversed, or no operation may take place.
Set according to the machine and applicable
motor when the system is started up.
Positioning data Positioning data Set the data for "major positioning control".
Block start data Set the block start data for "high-level positioning control".
Set the condition data for "high-level positioning control".
Set the condition judgment values for the condition
data used in "high-level positioning control".
Block start data
Condition data
Memo data
Synchronous control data Set the data for synchronous control.
Servo
parameters
Servo series
Servo amplifier parameters
(PA, PB, PC, PD, PE, PS, PF, Po, PL)
Set the data that is determined
by the specification of the servo
being used when the system
is started up.