



















13 - 18
Chapter 13 Control Sub Functions
AL has a significant number to first decimal place, round down numbers to
two decimal places.
AP
=
AP
=
166723584
=
166723584 (AP)
S
AL
AM
742201.2
742201.2 (AL)
1(AM)
Thus, AP, AL and AM
to be set are as follows.
AP = 166723584 ….[Pr.2]
AL = 742201.2 ..…..[Pr.3]
AM = 1 …………...…[Pr.4]
This setting will produce an error for the true machine value, but it cannot
be helped. This error is as follows.
7422012/166723584
- 1
100 = -8.69
10
–6
[%]
2362500
/166723584
AP (Number of pulses per rotation) = 4194304 [PLS]
S
(Movement amount per rotation)
= 135000.0 [
m]
Reduction ratio
= 135000.0 [
m]
7/53
1/3
It is equivalent to an about 86.9 [
m] error in continuous 1km feed.
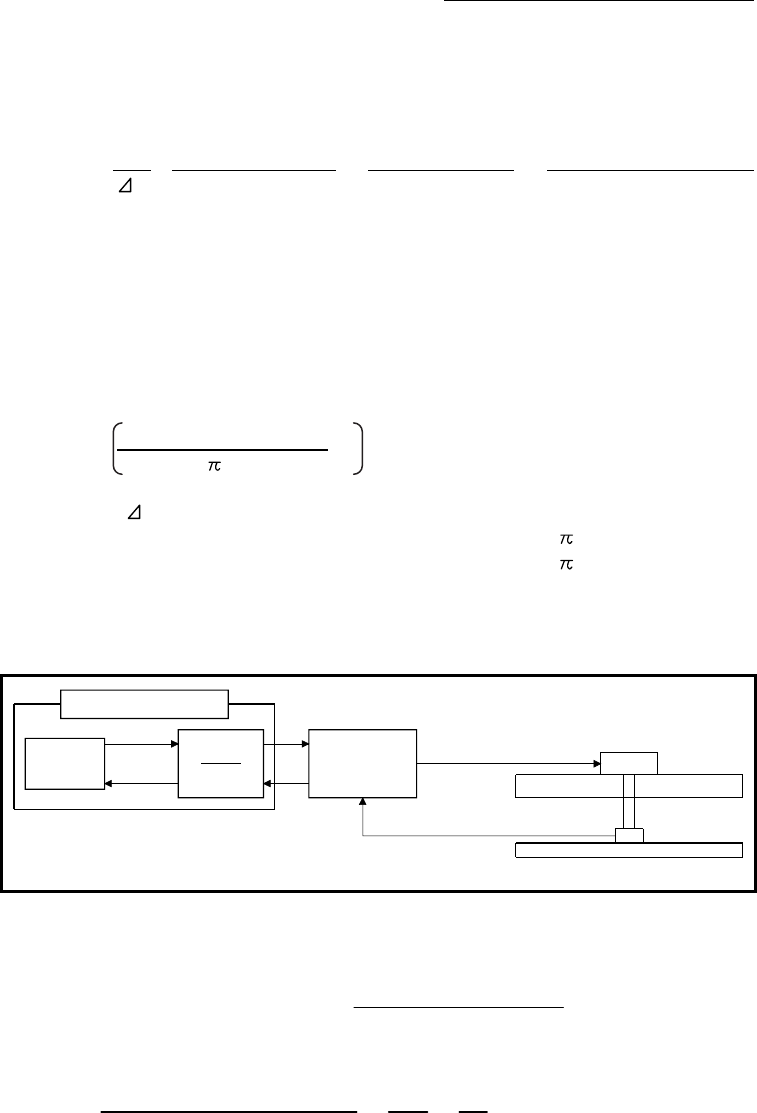
(5) Number of pulses/ movement amount at linear servo use
PLS
PLS
PLS
Simple Motion module
Feedback pulse
Command
value
Control
unit
AP
AL
Servo
amplifier
Linear servo motor
Linear encoder
Calculate the number of pulses (AP) and movement amount (AL) for the
linear encoder in the following conditions.
Linear encoder resolution =
Number of pulses (AP)
Movement amount (AL)
Linear encoder resolution: 0.05[m]
Number of pulses (AP) [PLS]
Movement amount (AL) [m]
=
1
0.05
=
20
1.0
Set the number of pulses in "[Pr.2] Number of pulses per rotation (AP)",
and the movement amount in "[Pr.3] Movement amount per rotation (AL)"
in the actual setting.
(Note): Set the same value as the value set in the fixed parameter to the
servo parameter "Linear encoder resolution setting Numerator
(PS02)" and "Linear encoder resolution setting Denominator
(PS03)".
Refer to each servo amplifier instruction manual for details.