13 - 82
Chapter 13 Control Sub Functions
(2) When teaching to the "[Da.7] Arc address", then teaching to the "[Da.6]
Positioning address/movement amount"
(Teaching example for 2-axis circular interpolation control with sub point
designation on QD77MS4 [axis 1] and [axis 2])
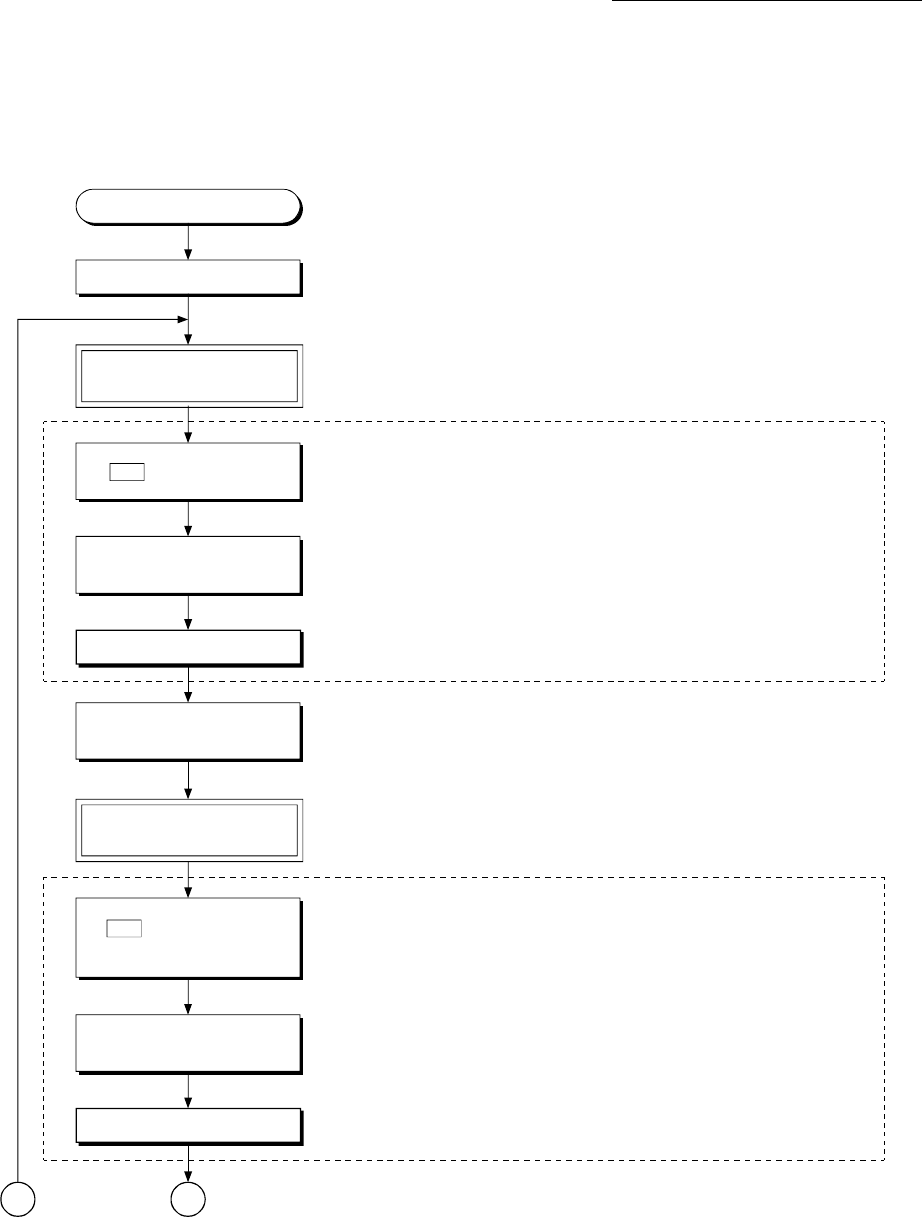
Start
Perform a machine OPR on axis 1
and axis 2.
Using a JOG operation, inching operation, or manual pulse generator
operation.
Move the workpiece to the circular
interpolation sub point using a
manual operation *
1
.
• • • • • • • •
Confirm that the buffer memory address [1549] has become 0.
• • • • • • • •
Set "Writes the current feed value
to " Da.6 Positioning address/
movement amount"" by teaching
data selection.
Set 0 in buffer memory address [1548].
• • • • • • • •
Set the positioning data No. for
which the teaching will be carried out.
Set the positioning data No. in the buffer memory address [1549].
• • • • • • • •
Set 1 in the buffer memory address [1548].
• • • • • • • •
Set "Writes the current feed value
to " Da.7 Arc address"" in
teaching data selection.
Confirm completion of the teaching.
Move the workpiece to the circular
interpolation end point position
using a manual operation *
2
.
Using a JOG operation, inching operation, or manual pulse generato
operation.
• • • • • • • •
Entering teaching data to buffer memory address [1648] and [1649],
in the same fashion as for axis 1.
• • • • • • • •
Teach arc sub point address of
axis 2.
Teaching arc sub point address on axis 1
Confirm that the buffer memory address [1549] has become 0.
• • • • • • • •
Set the positioning data No. for
which the teaching will be carried out.
Set the positioning data No. in buffer memory address [1549].
• • • • • • • •
Confirm completion of the teaching.
12
Teaching arc end point address on axis 1















































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































