


















8 - 14
Chapter 8 OPR Control
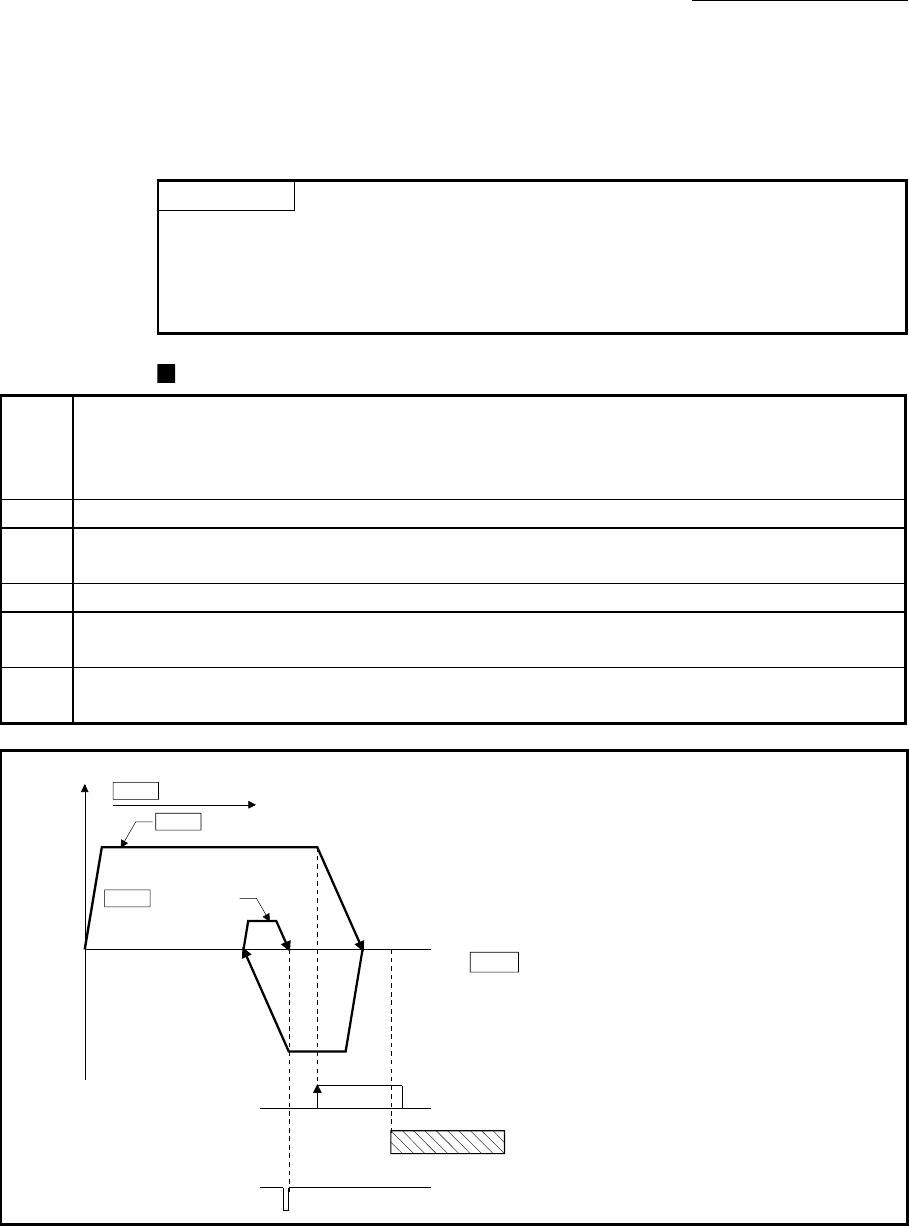
8.2.7 OPR method (5): Scale origin signal detection method
The following shows an operation outline of the OPR method "scale origin signal
detection method".
POINT
Set "0: Need to pass servo motor Z-phase after power on" in "Function selection C-
4 (PC17)". If "1: Not need to pass servo motor Z-phase after power on" is set, the
error "Z-phase passing parameter invalid" (error code: 231) will occur at the start of
scale origin signal detection method OPR.
Operation chart
1)
The machine OPR is started.
(The machine begins the acceleration designated in "[Pr.51] OPR acceleration time selection", in the
direction designated in "[Pr.44] OPR direction". It then moves at the "[Pr.46] OPR speed" when the
acceleration is completed.)
2) The machine begins decelerating when the near-point dog ON is detected.
3)
After deceleration stop, the machine moves in the opposite direction against of OPR at the "[Pr.46] OPR
speed".
4) During movement, the machine begins decelerating when the first zero signal is detected.
5)
After deceleration stop, the operation moves in direction of OPR at the "[Pr.47] Creep speed", and then
stops at the detected nearest zero signal.
6)
The OPR complete flag ([Md.31] Status: b4) turns from OFF to ON, and the OPR request flag ([Md.31]
Status: b3) turns from ON to OFF.
After 3), when the zero signal is in the near-point dog
position, deceleration stop (4)) is started at the zero signal
without waiting for the near-point dog OFF.
Zero signal
ON
1)
2)
OPR direction
POINT
Pr.44
V
6) 3)5)
4)
OFF
Near-point dog
Hardware limit switch
Pr.46
Pr.47
OPR speed
Creep speed
Fig. 8.10 Scale origin signal detection method machine OPR