



















13 - 97
Chapter 13 Control Sub Functions
13.7.9 Stop command processing for deceleration stop function
The "stop command processing for deceleration stop function" is provided to set the
deceleration curve if a stop cause occurs during deceleration stop processing
(including automatic deceleration).
This function is valid for both trapezoidal and S-curve acceleration/deceleration
processing methods.
(For the stop cause, refer to Section 1.2.3 "Outline of stopping".)
The "stop command processing for deceleration stop function" performs the following
two operations:
(1) Deceleration curve re-processing
Re-processes a deceleration curve starting from the speed at stop cause
occurrence until at a stop, according to the preset deceleration time.
(2) Deceleration curve continuation
Continues the current deceleration curve after a stop cause has occurred.
This section explains the "stop command processing for deceleration stop function" as
follows:
[1] Control
[2] Precautions for control
[3] Setting method
[1] Control
The operation of "stop command processing for deceleration stop function" is
explained below.
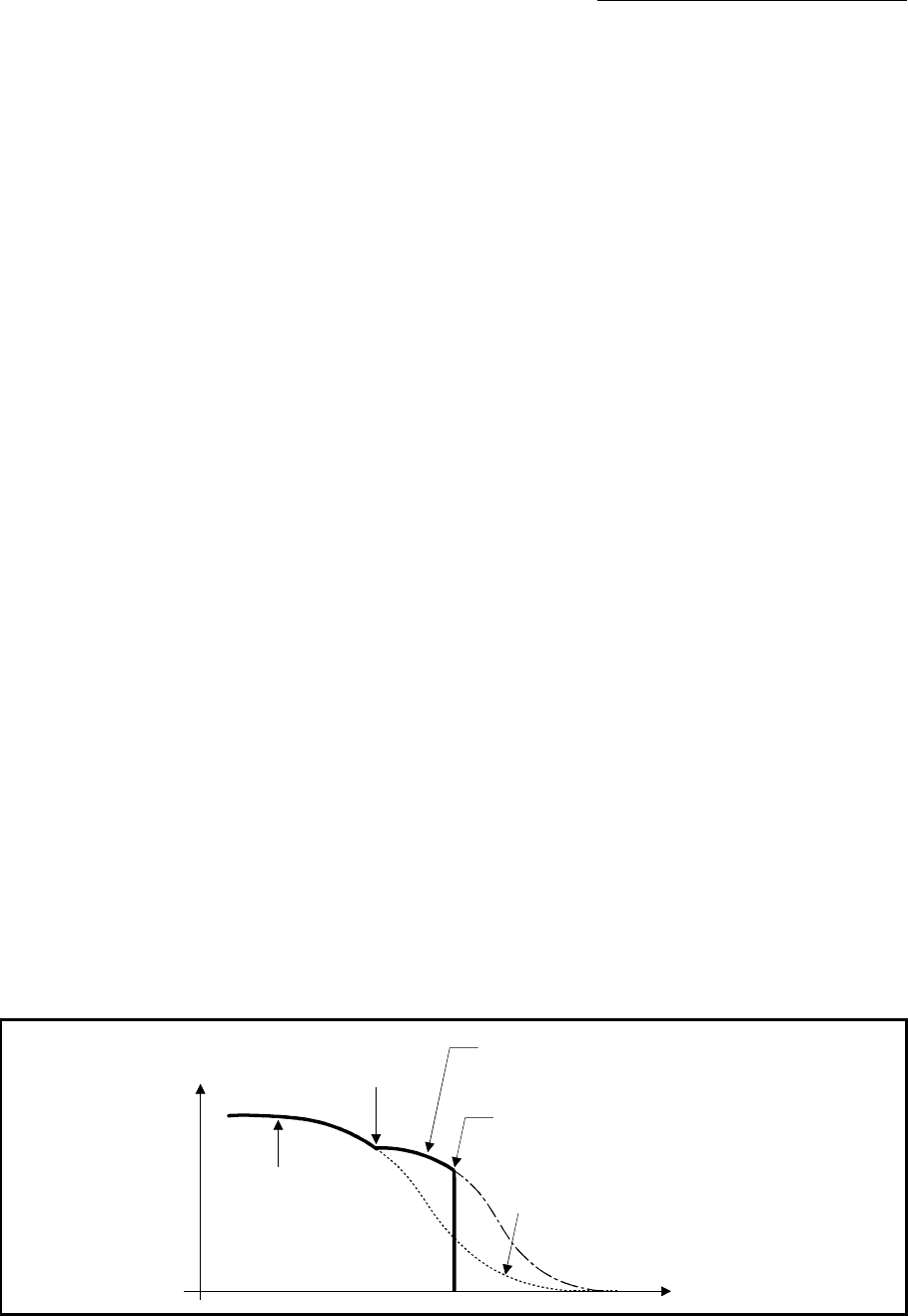
(1) Deceleration curve re-processing
A deceleration curve is re-processed starting from the speed at stop cause
occurrence until at a stop, according to the preset deceleration time.
If a stop cause occurs during automatic deceleration of position control, the
deceleration stop processing stops as soon as the target has reached the
positioning address specified in the positioning data that is currently
executed.
Stop cause
occurrence
t
V
Deceleration stop
processing (automatic
deceleration) start
Deceleration curve according
to preset deceleration time
Deceleration curve when stop
cause does not occur
Immediate stop at the specified
positioning address
Fig. 13.51 Deceleration curve re-processing operation (for position control or S-curve
acceleration/deceleration processing)