1 - 18
Chapter 1 Product Outline
Overview of acceleration/deceleration processing control
Acceleration/deceleration processing for the positioning processing, manual pulse-
generator processing, OPR processing and JOG processing is performed using the
user-specified method, acceleration time and deceleration time.
(1) Acceleration/deceleration method
There are two types of acceleration and deceleration processing: the trapezoidal
acceleration/deceleration processing method and S-curve acceleration/
deceleration processing method. A detailed parameter is used to set which
method is used. The specified acceleration/deceleration method is applied to all
accelerations and decelerations when starting and completing positioning
processing, OPR processing and JOG processing, as well as when changing the
speed.
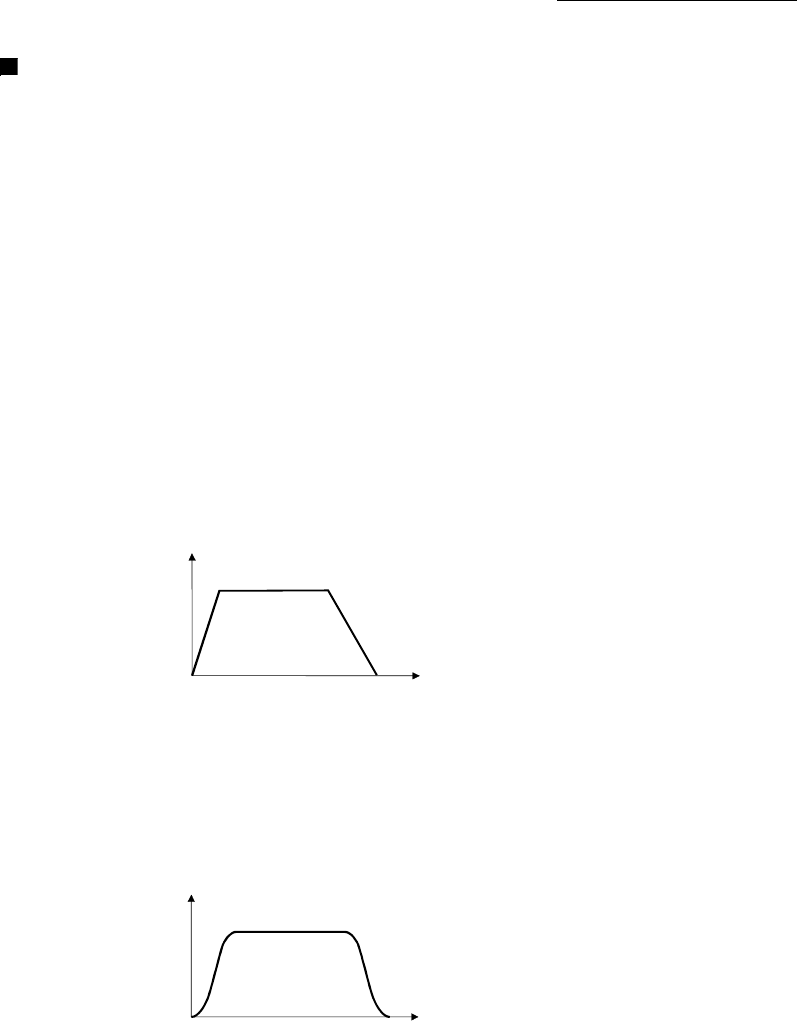
(a) Trapezoidal acceleration/deceleration processing method
This is a method in which linear acceleration/deceleration is carried out
based on the acceleration time, deceleration time, and speed limit value set
by the user.
Velocity
Tim
(b) S-curve acceleration/deceleration processing method
This method reduces the load on the motor when starting and stopping.
This is a method in which acceleration/deceleration is carried out gradually,
based on the acceleration time, deceleration time, speed limit value, and S-
curve ratio (1 to 100%) set by the user.
Velocity
Time
(2) Acceleration time, deceleration time, sudden-stop deceleration
time
(a) Four types each of the acceleration time and deceleration time for
positioning control can be set using basic parameters 2 and detailed
parameters 2.
• Acceleration time…….The time elapses before the speed of 0 reaches
the limit value.
• Deceleration time…….The time elapses before the speed at the limit
value reaches 0.
(b) The sudden-stop deceleration time (1 to 8388608 ms) is set using the
detailed parameters 2.















































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































