


















1 - 8
Chapter 1 Product Outline
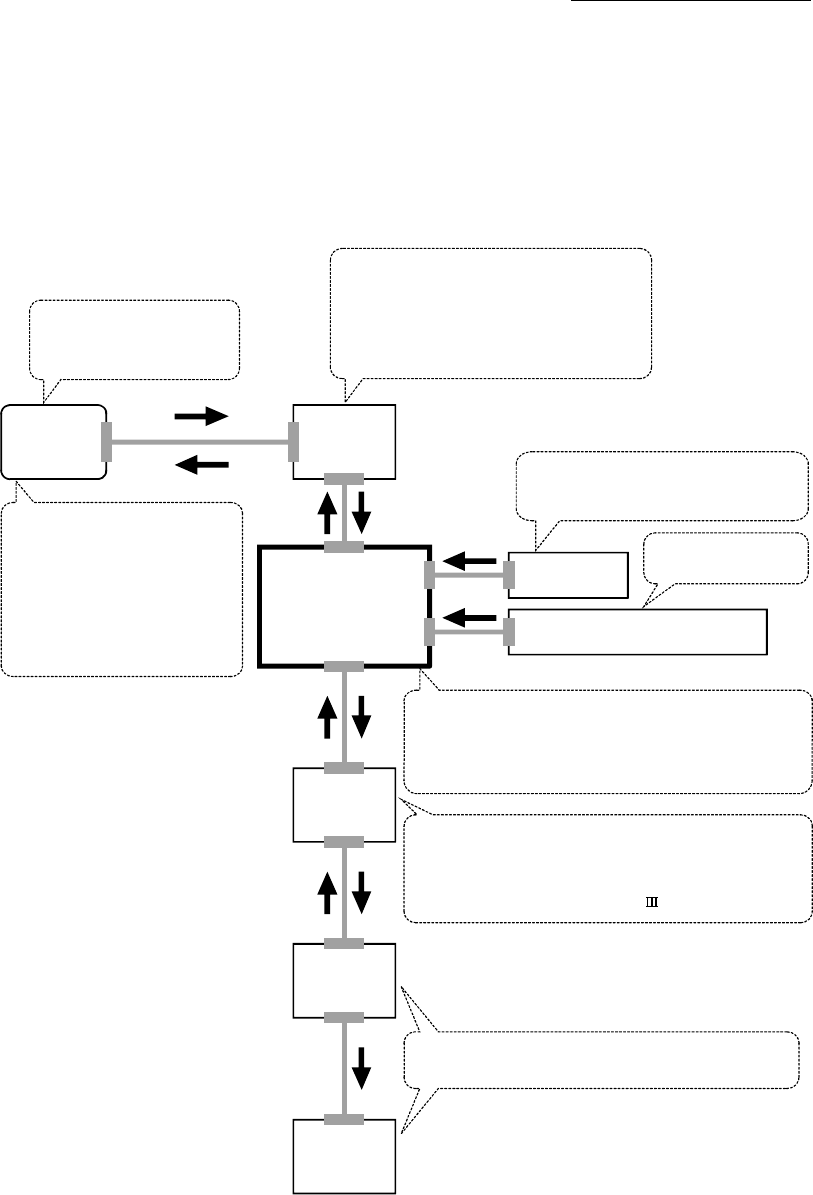
1.1.3 Mechanism of positioning control
In the positioning system using the Simple Motion module, various software and
devices are used for the following roles.
The Simple Motion module realizes complicated positioning control when it reads in
various signals, parameters and data and is controlled with the PLC CPU.
Working
parts of a
machine
Creates control order and
conditions as a sequence
program.
Stores the created program.
The PLC CPU outputs the start signal and
stop signal following the stored program
to the QD77MS.
QD77MS errors, etc., are detected.
GX Works2
PLC CPU
Outputs signals such as the start
signal, external command signal and
switching signal to the QD77MS.
QD77MS
Simple Motion
module
External signal
Manual pulse generator/
Incremental synchronous encoder
Issues commands by
pulse output.
Sets the parameters and
positioning data for control.
Outputs the start command for
JOG operation, etc., during test
operation with the test function.
Monitors the positioning
operation.
Servo
amplifier
Stores the parameter and data.
Outputs data to the servo amplifier according to the
instructions from the PLC CPU, GX Works2, external
signals and manual pulse generator.
Servo motor
Moves the machine according to commands from
the servo amplifier.
Receives positioning commands and control
commands from QD77MS, and drives the servo motor.
Outputs the positioning data such as the servo motor
to the QD77MS by the SSCNET (/H).