



















5 - 28
Chapter 5 Data Used for Positioning Control
5.2.2 Basic parameters 2
Item
Setting value, setting range
Default
value
Buffer memory address
Value set with GX Works2
Value set with sequence
program
QD77MS2
QD77MS4
QD77MS16
[Pr.8]
Speed limit value
The setting range differs depending on the "[Pr.1] Unit setting".
200000
10+150n
11+150n
[Pr.9]
Acceleration time 0
1 to 8388608 (ms) 1 to 8388608 (ms) 1000
12+150n
13+150n
[Pr.10]
Deceleration time 0
1 to 8388608 (ms) 1 to 8388608 (ms) 1000
14+150n
15+150n
n: Axis No.-1
[Pr.8] Speed limit value
Set the maximum speed during positioning, OPR and speed-torque operations.
[Pr.1] setting value Value set with GX Works2 (unit) Value set with sequence program (unit)
0 : mm 0.01 to 20000000.00 (mm/min)
1 to 2000000000 (×10
-2
mm/min)
1 : inch 0.001 to 2000000.000 (inch/min)
1 to 2000000000 (×10
-3
inch/min)
2 : degree 0.001 to 2000000.000 (degree/min)
1
1 to 2000000000 (×10
-3
degree/min)
2
3 : PLS 1 to 1000000000 (PLS/s) 1 to 1000000000 (PLS/s)
1: Range of speed limit value when "[Pr.83] Speed control 10 x multiplier setting for degree axis" is
set to valid: 0.01 to 20000000.00 (degree/min).
2: Range of speed limit value when "[Pr.83] Speed control 10 x multiplier setting for degree axis" is
set to valid: 1 to 2000000000 (
10
-2
degree/min)
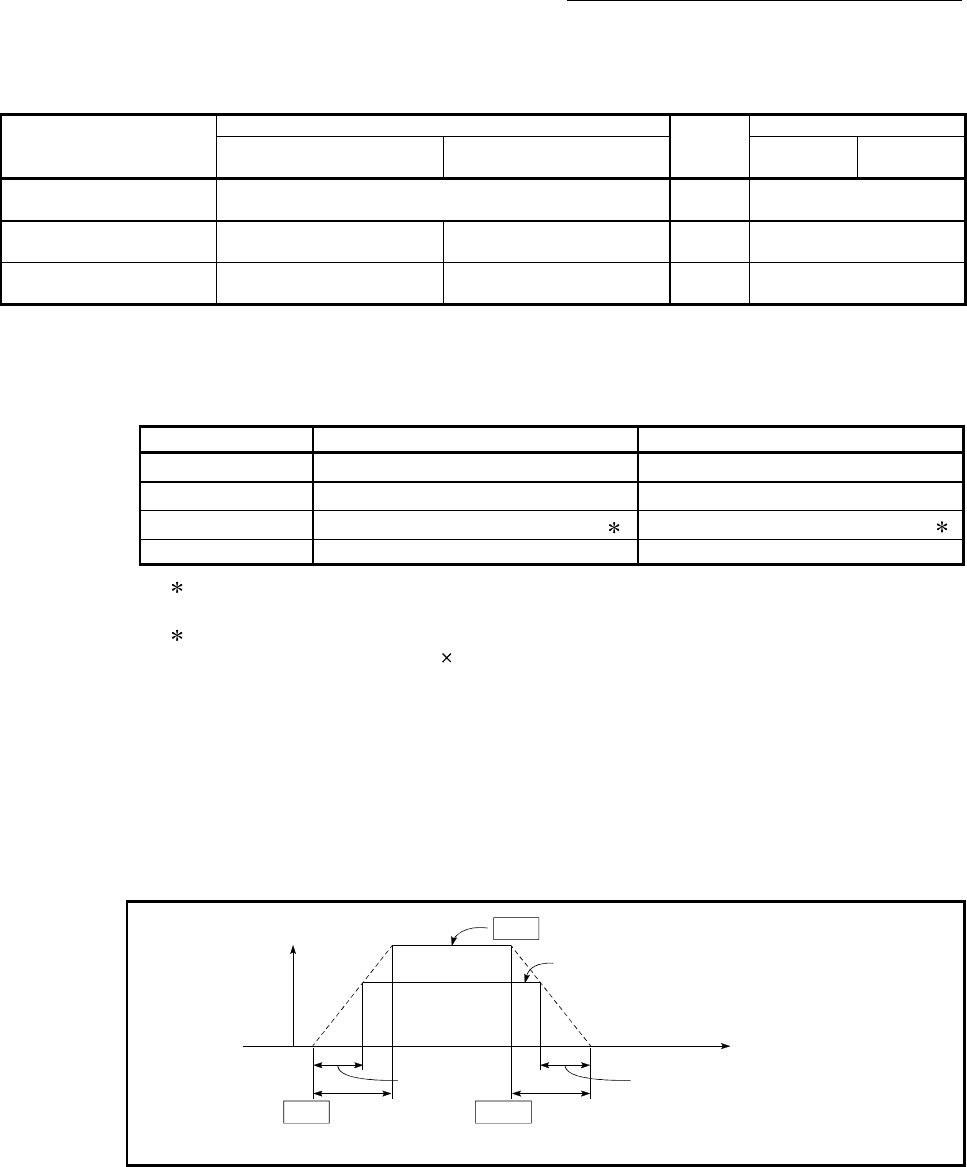
[Pr.9] Acceleration time 0, [Pr.10] Deceleration time 0
"[Pr.9] Acceleration time 0" specifies the time for the speed to increase from zero
to the "[Pr.8] Speed limit value" ("[Pr.31] JOG speed limit value" at JOG operation
control).
"[Pr.10] Deceleration time 0" specifies the time for the speed to decrease from the
"[Pr.8] Speed limit value" ("[Pr.31] JOG speed limit value" at JOG operation
control) to zero.
Actual
acceleration
time
Actual deceleration time
Time
Velocity
Speed limit value
Positioning speed
Acceleration time 0
Pr.9
Pr.10
Pr.8
Deceleration time 0
1) If the positioning speed is set lower than the parameter-defined speed limit
value, the actual acceleration/deceleration time will be relatively short. Thus, set
the maximum positioning speed equal to or only a little lower than the
parameter-defined speed limit value.
2) These settings are valid for OPR, positioning and JOG operations.
3) When the positioning involves interpolation, the acceleration/deceleration time
defined for the reference axis is valid.