



















5 - 55
Chapter 5 Data Used for Positioning Control
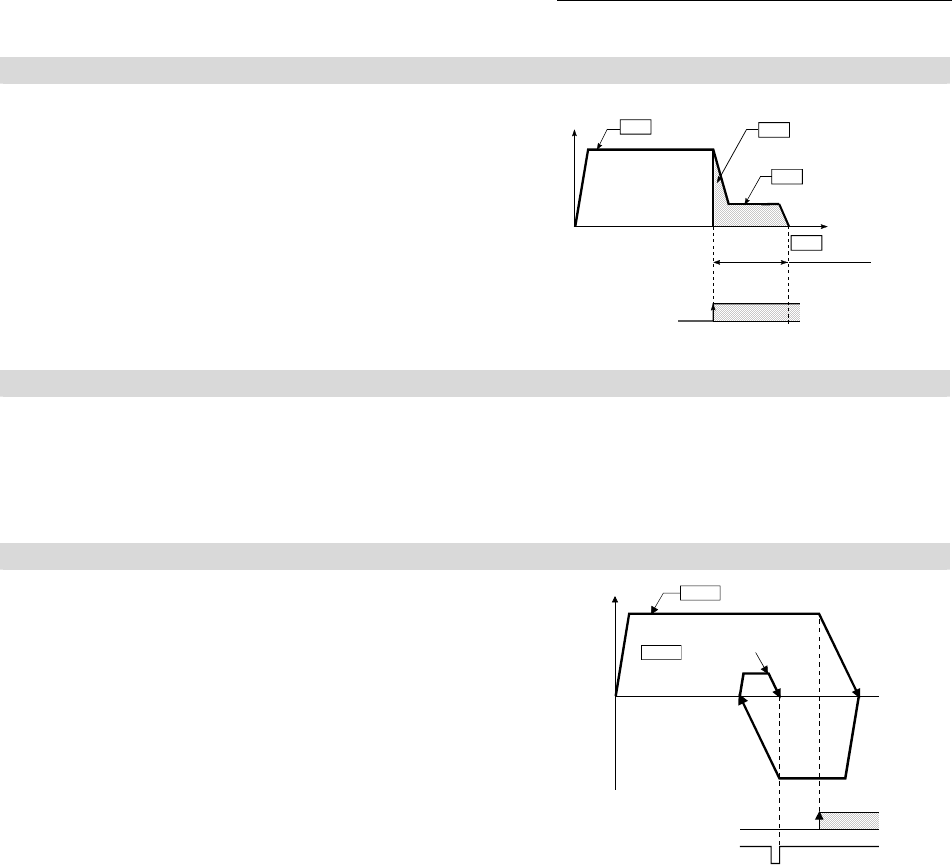
5 : Count method 2)
(1) Start machine OPR.
(Start movement at the "[Pr.46] OPR speed" in the "[Pr.44]
OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to "[Pr.47] Creep speed", and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in "[Pr.50] Setting for the movement amount
after near-point dog ON" has passed, machine OPR is
completed.
t
V
ON
(1)
(2)
(3)
(4)
Near-point dog OFF
Movement amount afte
r
near-point dog ON
Md.34
OPR speed
Pr.46
Pr.47 Creep speed
Pr.50
Setting for the movement
amount after near-point dog ON
6 : Data set method
The position where the machine OPR has been made will be the OP.
(Perform after the servo amplifier has been turned ON and the servomotor has been rotated at least once using the
JOG or similar operation. However, if selecting "1: Not need to pass servo motor Z-phase after power on" with
"Function selection C-4 (PC17)", it is possible to carry out the home position return (OPR) without passing the zero
point.)
7 : Scale origin signal detection method
(1) Start machine OPR.
(Start movement at the "[Pr.46] OPR speed" in the "[Pr.44]
OPR direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) After deceleration stop, it moves in the opposite direction
against of OPR at the "[Pr.46] OPR speed".
(4) During movement, the machine begins decelerating when
the first zero signal is detected.
(5) After deceleration stop, it moves in direction of OPR at the
speed set in "[Pr.47] Creep speed", and stops at the
detected nearest zero signal to complete the machine OPR.
(5)
OFF
ON
(2)
(1)
(4)
(3)
V
Near-point dog
Zero signal
Pr.47
Creep speed
Pr.46
OPR speed