



















13 - 10
Chapter 13 Control Sub Functions
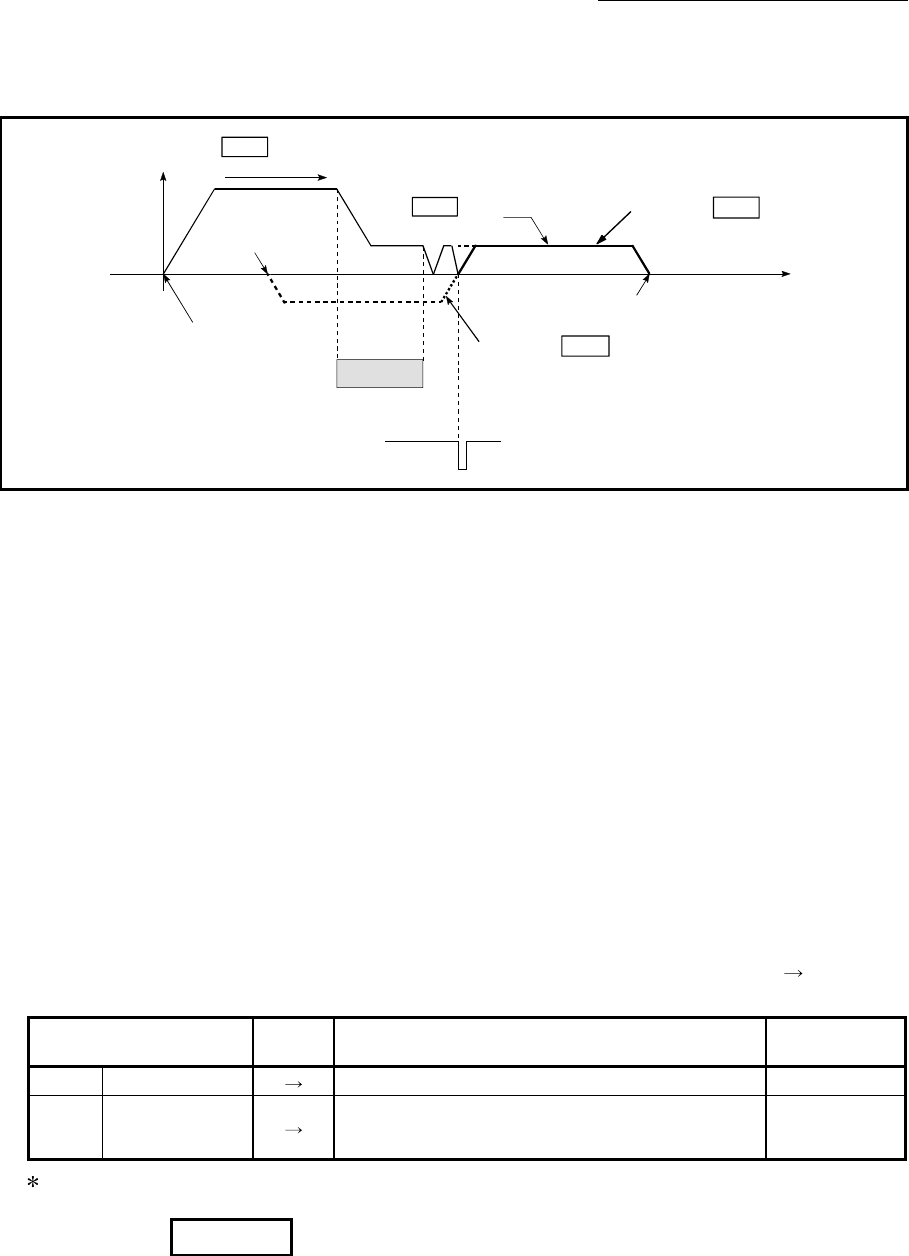
(2) OP shift operation at the "[Pr.47] Creep speed"
(When "[Pr.56] Speed designation during OP shift" is 1)
When the " Pr. 53 OP
shift amount" is negative
When the " Pr. 53 OP
shift amount" is positive
Pr. 44 OPR
direction
OP
Machine OPR start
Near-point dog
Zero signal
OP
Pr. 47 Creep
speed
V
Fig. 13.7 OP shift operation at the creep speed
[4] Precautions during control
(1) The following data are set after the OP shift amount is complete.
OPR complete flag ([Md.31] Status: b4)
[Md.20] Current feed value
[Md.21] Machine feed value
[Md.26] Axis operation status
OPR request flag ([Md.31] Status: b3) is reset after completion of the OP
shift.
(2) "[Pr.53] OP shift amount" is not added to "[Md.34] Movement amount after
near-point dog ON". The movement amount immediately before the OP shift
operation, considering near-point dog ON as "0", is stored.
[5] Setting the OP shift function
To use the "OP shift function", set the required details in the parameters shown in
the following table, and write them to the Simple Motion module.
When the parameters are set, the OP shift function will be added to the machine
OPR control. The set details are validated at the rising edge (OFF
ON) of the
PLC READY signal [Y0].
Setting item
Setting
value
Setting details
Factory-set
initial value
[Pr.53]
OP shift amount
Set the shift amount during the OP shift. 0
[Pr.56]
Speed
designation
during OP shift
Select the speed during the OP shift
0: [Pr.46] OPR speed
1: [Pr.47] Creep speed
0
: Refer to Section 5.2 "List of parameters" for setting details.
REMARK
Parameters are set for each axis.
It is recommended that the parameters be set whenever possible with GX Works2.
Execution by sequence program uses many sequence programs and devices. The
execution becomes complicated, and the scan times will increase.