



















191
Pulse Outputs Section 7-6
Note The pulse output can be stopped by executing ACC(888) with a deceleration
target frequency of 0. However, since the pulse output cannot be stopped at
the correct number of pulses, the deceleration target frequency should not be
set to 0 if it is necessary to output a precise number of pulses.
Absolute Positioning with Continually Changing Target Position
This example performs absolute positioning (Electronic Cam Control) using a
single-phase pulse output without acceleration/deceleration, and the target
position is updated every cycle. This function relies on a constant cycle time,
in which the ladder program is executed every 2 ms, and positioning is per-
formed using a target value that is changed every cycle according to the
high-speed counter PV.
The pulse output is controlled by the target position, which is calculated
repeatedly from the high-speed counter PV. The target position is calculated,
so the APR instruction can be used for linear approximation.
The high-speed counter is set for circular operation with a circular value of
999 BCD.
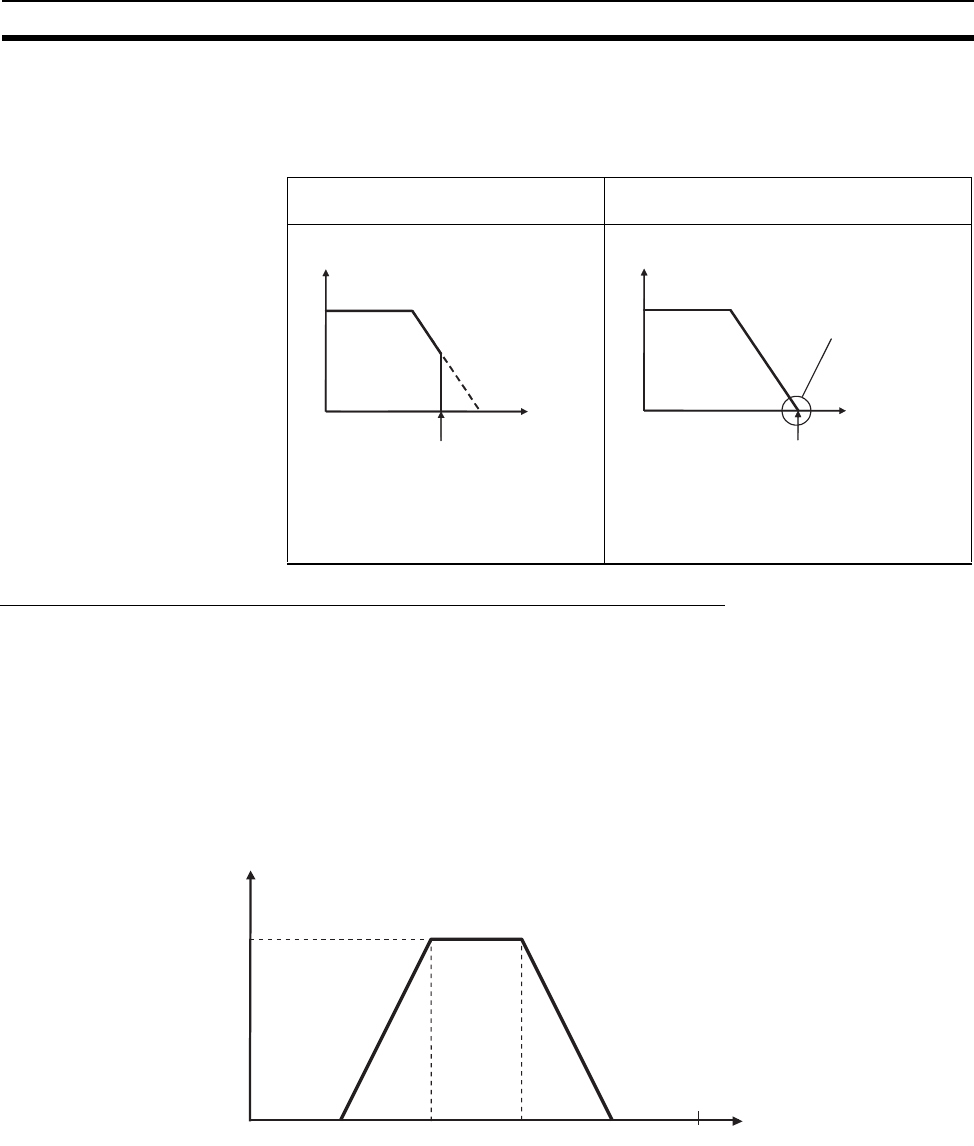
Specified number of pulses
reached before speed reaches 0.
Speed reaches 0 while the remaining
number of pulses is 0 or more.
0
Speed
(frequency)
Time
At this point, the actual number of output
pulses equals the preset number of pulses.
0
Speed
(frequency)
Time
At this point, the actual number of output pulses
may not equal the preset number of pulses.
To be sure that the actual number of output
pulses equals the specified number of pulses,
set the Module so that the speed is greater
than 0 (e.g., the starting frequency) when the
specified number of pulses have been output.
4,000
0
400 800600 999
200
Pulse output target
frequency in D00000
and D00001 (BCD)
High-speed
Counter PV (BCD)