



















3 - 13
3 DESIGN
3.2.2 Safety circuit design
(1) Concept of safety circuits
When the Motion controller is powered on-off, proper outputs may not be
provided temporarily due to the delays and rise times of the Motion controller
power supply and external I/O control power supplies (especially DC).
Also, abnormal operations may be performed when the
external power supply becomes faulty or the Motion controller fails.
Construct the circuit (emergency stop, protective and interlock circuits, etc.) of
parts which may occur machine breakdown and accidents due to abnormal
operations outside of the Motion controller in a fail-safe viewpoint, to avoid
abnormal operations of whole system.
(2) Emergency stop circuit
The circuit should be constructed outside of the Motion controller or servo
amplifier. Shut off the power supply to the external servo amplifier by this circuit,
make the electromagnetic brakes of the servomotor operated.
(3) Forced stop circuit
(a) It is possible to effect the forced stop all axes of the servo amplifier
(MR-H-BN/MR-J2
-B) at once via the forced stop input of the input
modules. After the forced stop, remove the forced stop factor and cancel the
forced stop. (The servo error detection signal does not turn on with the
forced stop.)
It is possible to set the forced stop input No. by the parameter setting of the
system setting.
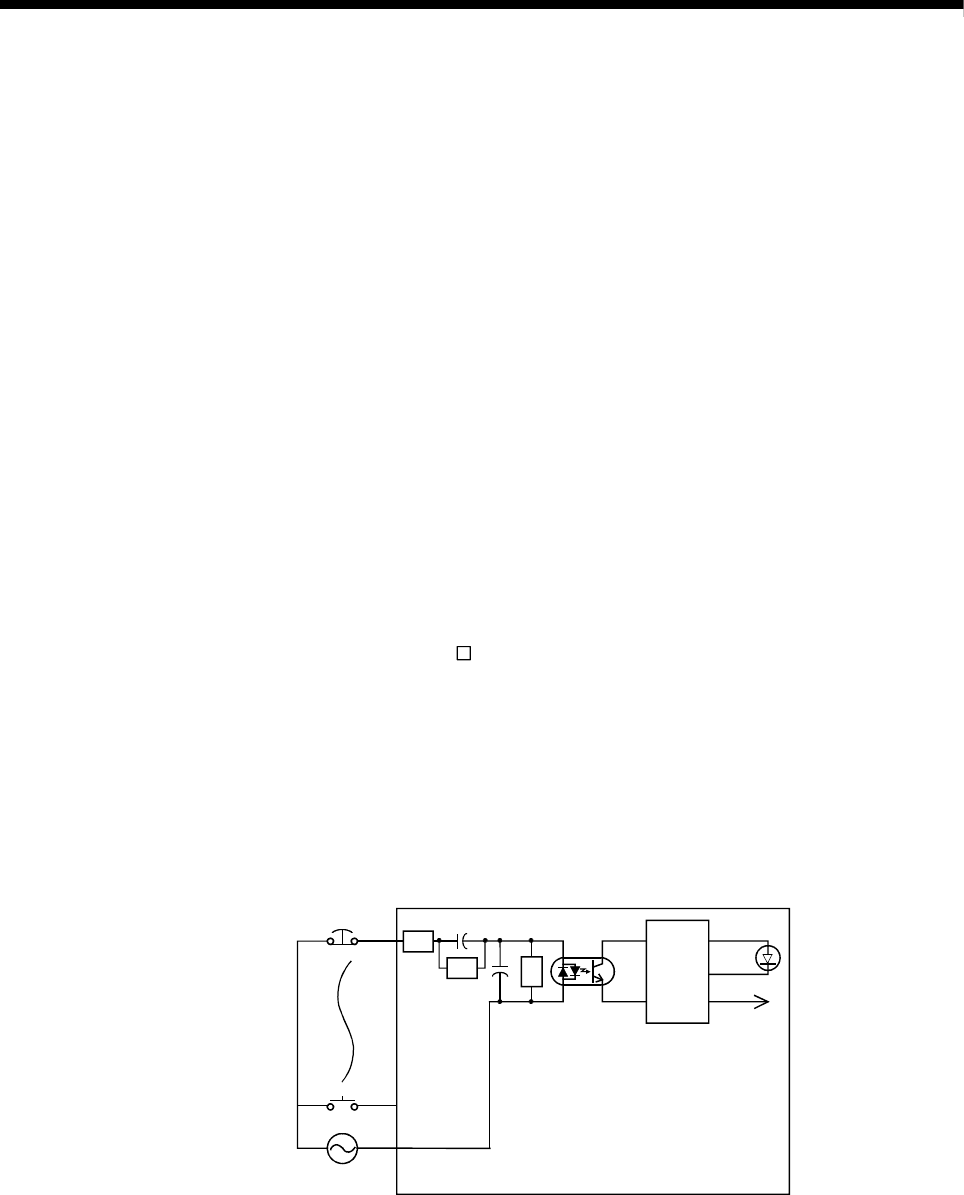
The forced stop wiring example is shown below.
Input module (Example : QX10)
R
Forced stop
LED
Internal
circuit
TB17
100VAC
R
R
TB16
(Note): It is possible to set the forced stop (Xn)
of the system settings at the user side.
TB1