



















70
Epsilon EP-I Indexing Drive and FM-2 Indexing Module Reference Manual
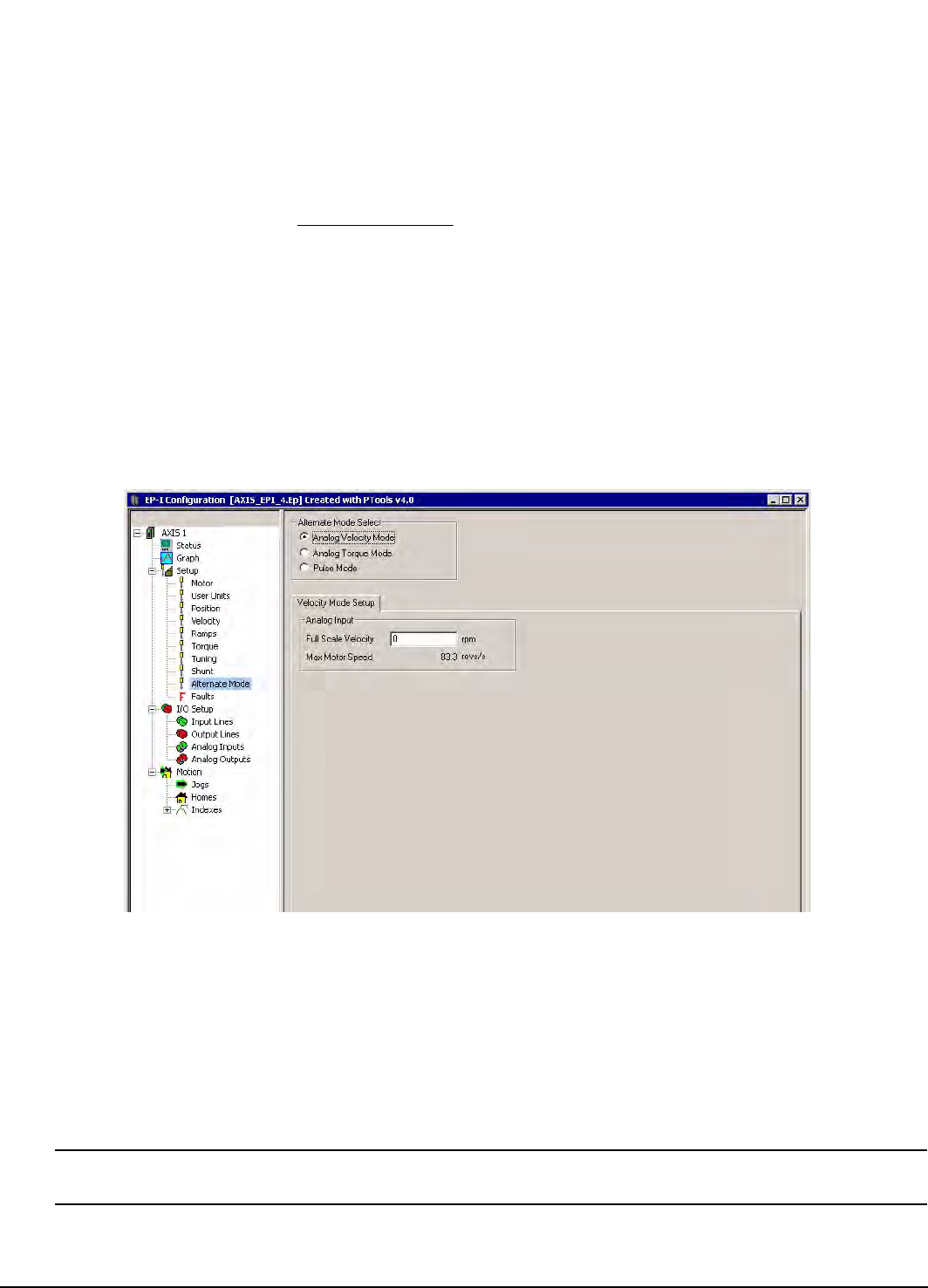
Alternate Mode Select
Analog Velocity Mode
Analog Inputs
The Analog Inputs receives an analog voltage which is converted to the Velocity Command Analog parameter using the Full
Scale Velocity, Analog Input Full Scale, and Analog Input Zero Offset parameters. The equation for this conversion is:
Where:
VCA = Velocity Command Analog (RPM)
AI = Analog Input (volts)
AZO = Analog Input Zero Offset (volts)
FSV = Full Scale Velocity (RPM)
AFS = Analog Input Full Scale (volts)
The Velocity Command is always equal to the Velocity Command Analog in Analog Velocity mode. The Velocity Command
is the command received by the velocity closed loop control.
Figure 72: Alternate Mode - Analog Velocity Mode
Analog Input Group
Full Scale Velocity
This parameter displays the maximum velocity attainable given the max analog value detailed in the Analog Full Scale
parameter.
Analog Torque Mode
In Torque mode both the position and velocity loops are disabled and only the torque loop is enabled.
Note
Velocity related faults and velocity related input and output functions are still enabled (including Stop and Travel Limits).
A
FS
FSV) AZO) ((AI
VCA
−
=