



















59
Operational Overview
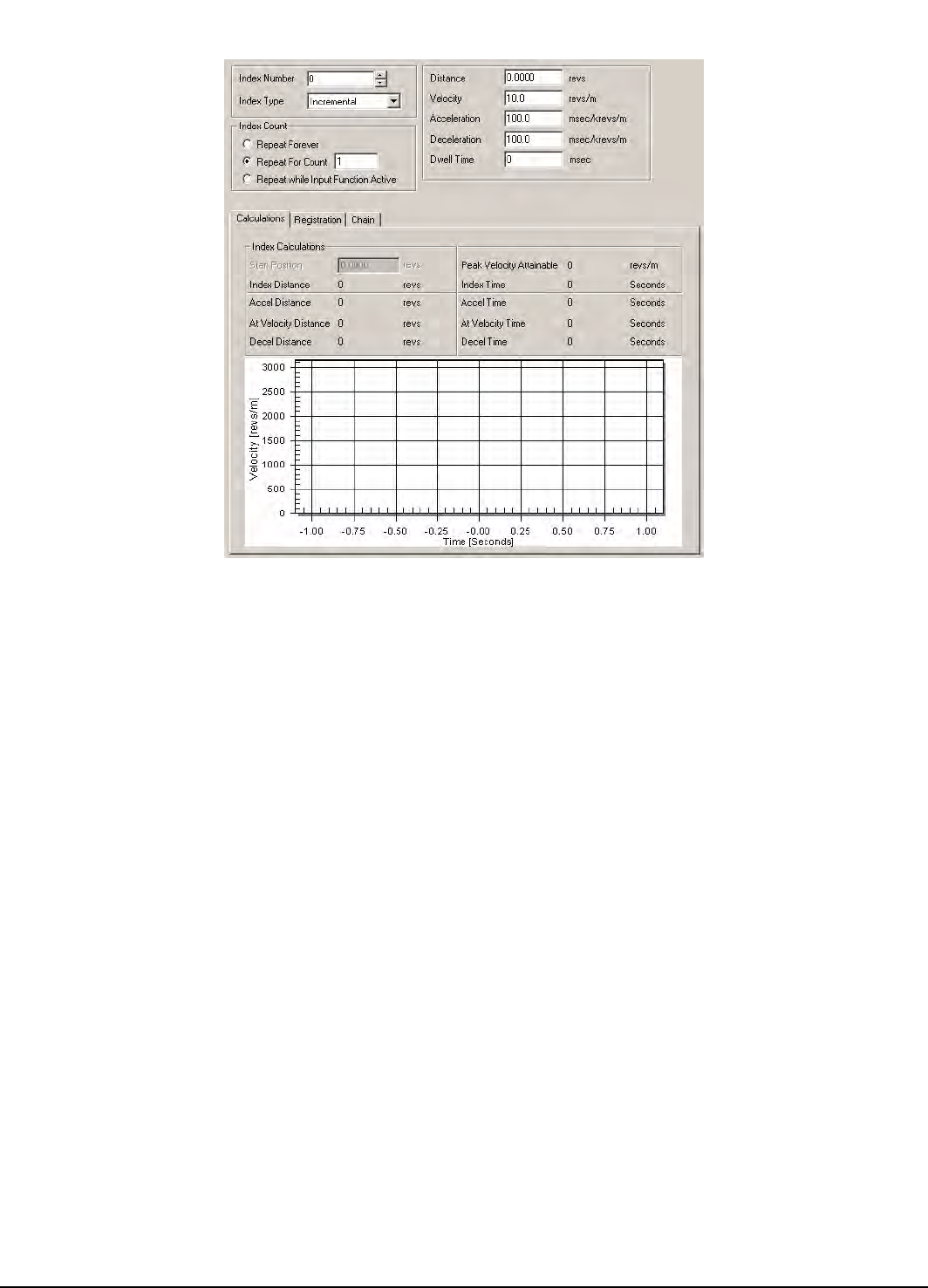
Figure 63: Index 0 View
All Indexes use linear acceleration and deceleration ramps which may or may not reach the specified velocity depending on
the total distance and the ramp values. For example, a short move with long acceleration and deceleration ramps may not
reach the peak velocity entered.
Indexes cannot be initiated when any other motion (jogging, homing) is in progress. Indexes can be aborted with the Stop
Input function.
Index Type
The device supports five types of indexes: Absolute, Incremental, Registration, Rotary plus, and Rotary minus.
Absolute vs. Incremental
The difference between absolute and incremental indexes is that absolute indexes move to a specific absolute position and
incremental indexes move the motor a specific distance. The figures and explanations below demonstrate this concept.
Absolute Indexes
Absolute indexes are used in applications where the motor must travel to a specific position, regardless of where the motor
is when the index is initiated.
The device calculates the distance required to move to the specified position from the current position.
Absolute Index
Start position = 6
Absolute index position = 4