



















43
Operational Overview
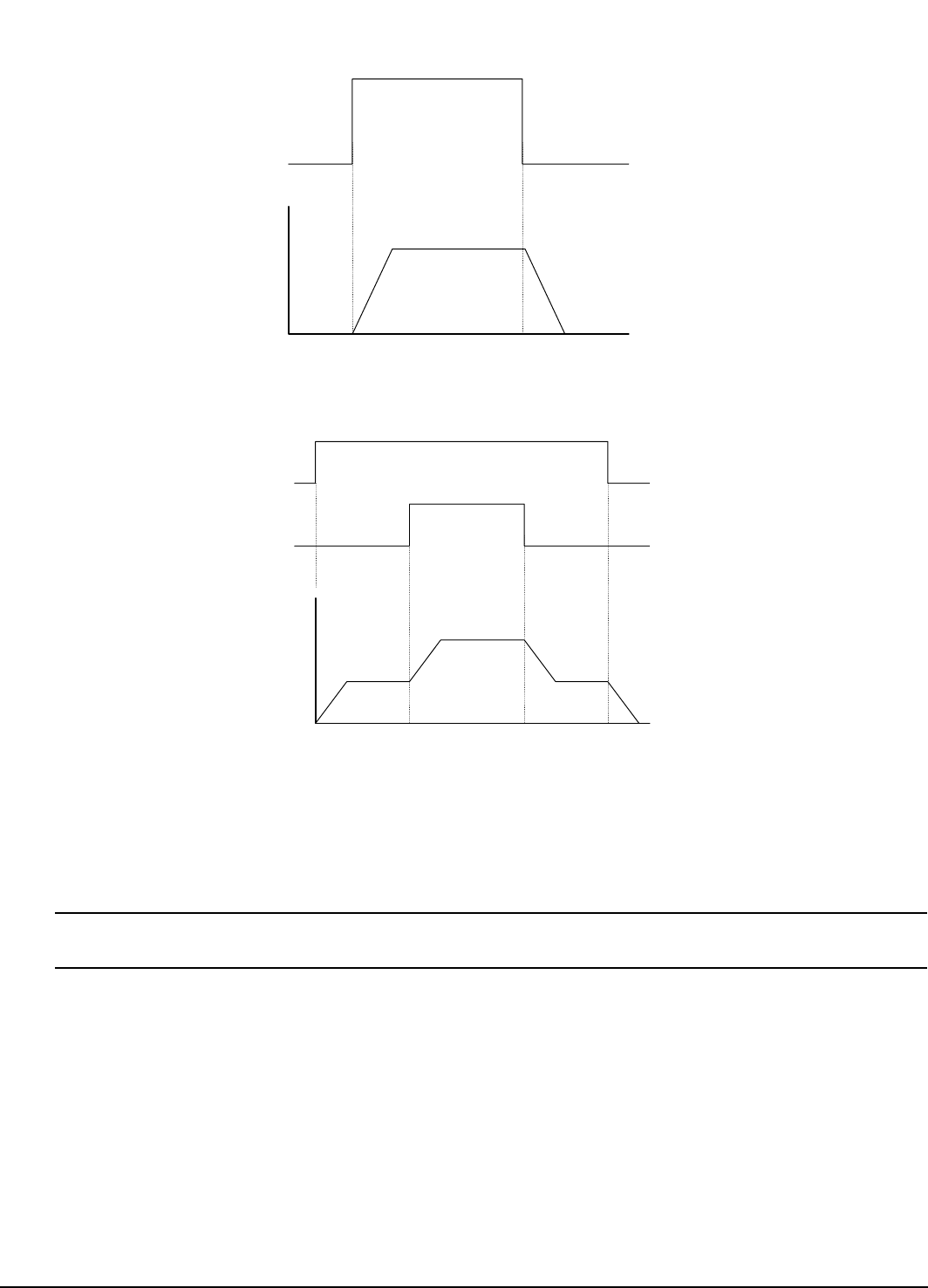
Figure 33: Jog Input
Figure 34: Jog Input and Jog Fast Input
When the Jog Fast input function is not active, the target velocity for the jog is the Jog Velocity. If the Jog Fast input function
is active, the target velocity of the jog is the Jog Fast Velocity. Jog Fast can be toggled “On” or “Off” while jogging. Jog
acceleration and deceleration ramps are used to ramp between jog velocities.
If the Jog direction is reversed, the Jog deceleration value will be used to decelerate the motor to zero speed and then the Jog
acceleration will be used to accelerate to the new (opposite sign) velocity.
Note
The Jog function cannot be initiated when any other motion type (homing, indexing) is in progress.
If both jog input functions are “On” there is no motion after a jog deceleration (they effectively cancel each other). The drive’s
display will show “R”, for ready.
If the device is jogging with the Jog + Input function “On” and the Jog - Input function goes active, the device behaves the
same as if it would in Jog + just turned “Off”.
The Stop input function will override the Jog operation and decelerate the motor to zero speed.
If the motor reaches a Travel Limit, you can Jog off the Travel Limit in the opposite direction. (Use Jog + to move off a Travel
Limit -).
How Home Works
The Home routine is used in applications in which the axis must be precisely aligned with some part of the machine. The
Home routine is initiated with the Home Initiate Input Function.
Velocity
Time
Jog + Input
On Off
Velocity
Time
Jog + Input
On Off
Jog Fast Input
OffOn