



















20
Epsilon EP-I Indexing Drive and FM-2 Indexing Module Reference Manual
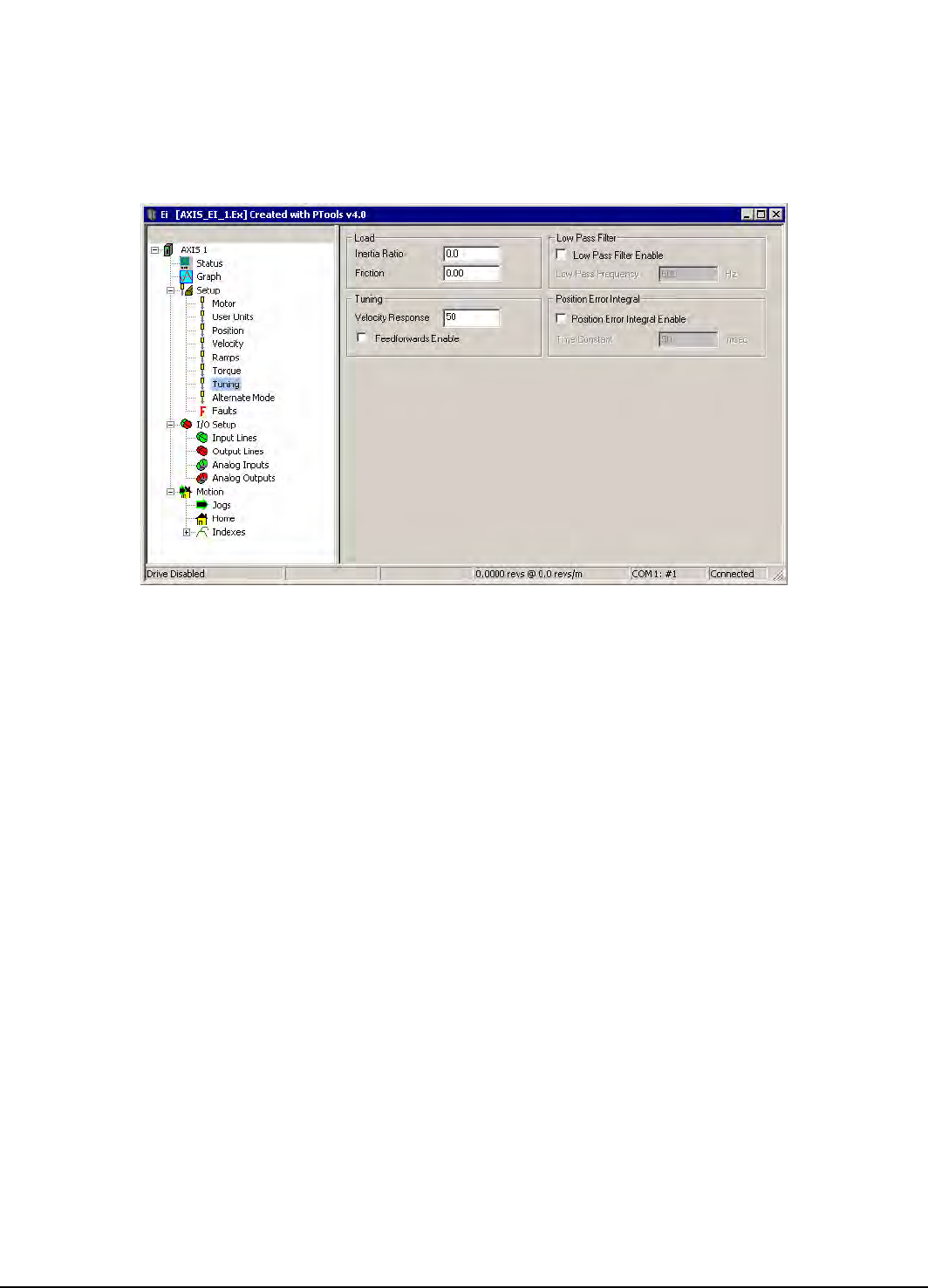
Tuning View
All parameters on the Tuning view are related to the load on the motor and application requirements.
The load on the motor is specified by two parameters: Inertia Ratio and Friction. Typical application requirements are
specified by the response adjustment and Feedforward Gains. Position Error Integral is provided to compensate for systems
with high friction or vertical loads. Low Pass Filter is provided to filter machine resonance that are present in some
applications.
Figure 13: Tuning View
Load Group
Inertia Ratio
Inertia Ratio specifies the load to motor inertia ratio and has a range of 0.0 to 50.0. If the exact inertia is unknown, a
conservative approximate value should be used. If you enter an inertia value higher than the actual inertia, the resultant motor
response will tend to be more oscillatory.
Friction
This parameter is characterized in terms of the rate of friction increase per 100 motor RPM. If estimated, always use a
conservative (less than or equal to actual) estimate. If the friction is completely unknown, a value of zero should be used. A
typical value used here is less than one percent.
Tuning Group
Velocity Response
The Velocity Response parameter adjusts the velocity loop bandwidth with a range of 1 to 500 Hertz. In general, it affects
how quickly the drive will respond to commands, load disturbances and velocity corrections. A good value to start with (the
default) is 50 Hz. The maximum value recommended is 80 Hz.
Feedforwards Enable Check Box
When this check box is selected feedforwards are enabled, the accuracy of the Inertia and Friction parameters is very
important. If the Inertia parameter is larger than the actual inertia, the result could be a significant overshoot during ramping.
If the Inertia parameter is smaller than the actual inertia, following error during ramping will be reduced but not eliminated.
If the Friction parameter is greater than the actual friction, it may result in velocity error or instability. If the Friction
parameter is less than the actual friction, velocity error will be reduced but not eliminated.