



















130
Epsilon EP-I Indexing Drive and FM-2 Indexing Module Reference Manual
encoderMarker=330
encoderU=330
encoderRef=0
rotorInertia=0.00017
motorKE=28.3
phaseResistance=7.30
phaseInductance=12.5
peakCurrent=7.80
continuousCurrent=2.60
maxOperatingSpeed=5000
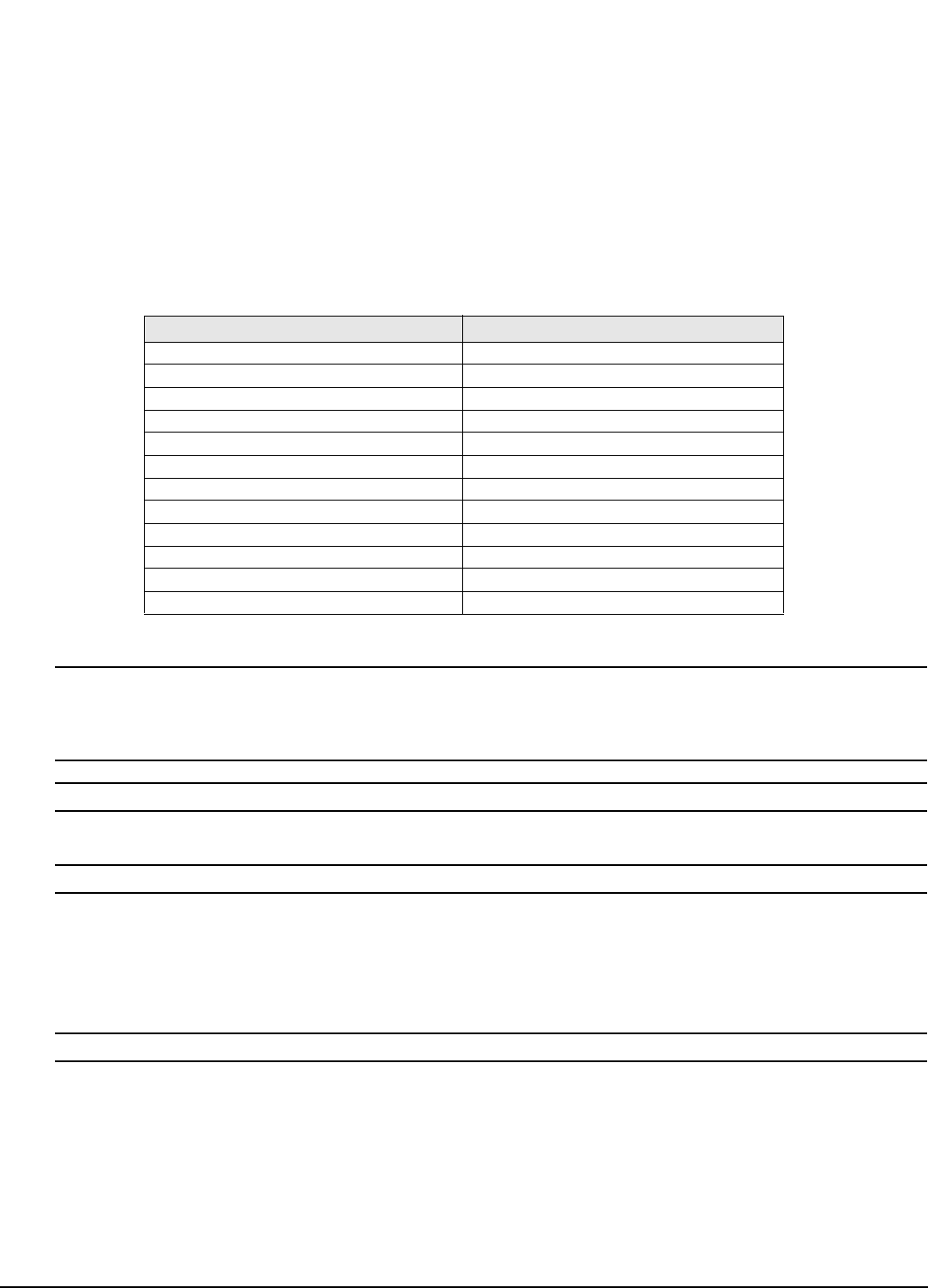
In this example, the parameters of two user defined motors are named “User1” and “User2”. Abbreviated parameter
identifiers are used in the .ddf file. The table below shows the abbreviated identifier for each parameter followed by a
description of each.
Motor Parameter Descriptions
Note
These parameters are valid and active only when a user defined motor is selected. When a Control Techniques motor is
selected, the data in these registers remain at the last value set and do not update to reflect the data of the Control
Techniques motor selected.
Motor Poles
Specifies the number of magnetic pole pairs (N-S) on the motor. The supported values are 2, 4, 6, 8, 10, 12, 14 and 16 poles.
Motor Encoder Lines Per Revolution
Specifies the number of encoder lines per mechanical revolution. The supported values are 1000, 1024, 2000, 2048, 2500,
4096 and 8192. The number of “encoder counts” per revolution is 4 times the value specified here because quadrature
decoding is used.
This parameter is used both for commutation and for position/ velocity control. To properly commutate the motor, the drive
must know the electrical angle (the angle between the motor magnetic field and stator coils).
Motor Encoder Marker Angle
Specifies the electrical angle at which the marker (Z) pulse occurs with reference to V
TS
when the motor is spun in the encoder
reference direction. At power-up the drive obtains an initial estimate of the electrical angle from the status of the U, V and W
commutation tracks. This estimate can be off by as much as 30 °.
When the drive receives the marker pulse, the drive will, within one second, gradually shift the commutation to the more
accurate electrical angle specified by this parameter. The system will then operate more efficiently. See “Step 3: Determine
Encoder Alignment” for a detailed procedure on how to determine this parameter.
Motor Parameter DDF Identifier
Motor Poles motorPoles
Motor Encoder Lines Per Revolution encoderLines
Motor Encoder Marker Angle encoderMarker
Motor Encoder U Angle encoderU
Motor Encoder Reference Motion encoderRef
Motor Inertia rotorInertia
Motor KE motorKE
Motor Resistance phaseResistance
Motor Inductance phaseInductance
Motor Peak Current peakCurrent
Motor Continuous Current continuousCurrent
Motor Maximum Operating Speed maxOperatingSpeed