



















48
Epsilon EP-I Indexing Drive and FM-2 Indexing Module Reference Manual
Note
The data above assumes the use of a perfectly repeatable home sensor.
Sensor and Marker, and Marker home types will establish a repeatable home position within one encoder count at any motor
velocity.
Note
The one encoder count factor assumes the motor is approaching the marker from the same direction. If different directions
are used, the final home position will be off by four encoder counts (0.000488 revolutions).
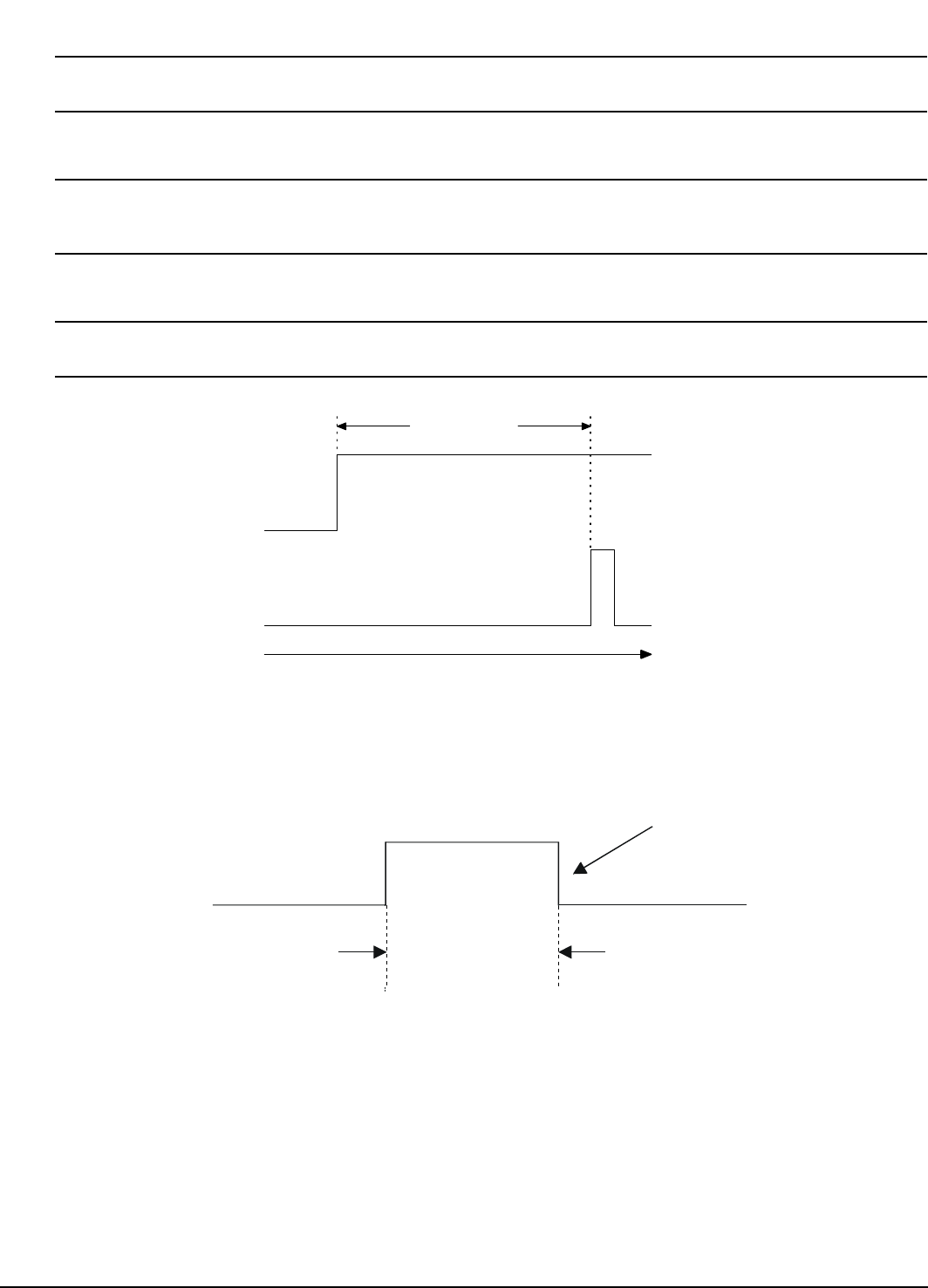
In Sensor and Marker applications, the marker must be at least 800 µs after the rising edge of the sensor input to be considered
a valid marker pulse.
Note
At 1000 RPM, the motor will travel 0.0133 revolutions (or 4.8°) in 800 µs.
Figure 42: Sensor and Marker Position
The Home Sensor must be “On” for at least 50 µsec to guarantee that it will be recognized.
Figure 43: Sensor Position
Home Offset
The Home Offset is the distance from the Reference Position to the final stopping point at the end of the homing sequence.
Regardless of the value you enter for the Offset or which Home Reference you choose, an offset is always inherent in the
homing process.
The user may either specify a desired offset or allow the drive to calculate an offset automatically. The drive calculates an
offset that ensures that the motor will not have to backup to get to the offset position. This is very convenient for unidirectional
applications.
Marker
Sensor
>800 µsec
Direction of Travel
Sensor Min.
On Time
50 sec
µ
Sensor