



















13
Setting Up Parameters
Parameters Not Matching List
This list is part of the User Defined Motor Name Conflict dialog box and displays the parameter value(s) from the Motor
Parameters column that do not match the equivalent parameter value in either the motor.ddf or stdmotor.ddf files, for the
motor with the matching name.
This helps the user to determine whether they wish to overwrite, cancel, or create a new motor with this Save .ddf Values
operation.
User Units View
The User Units View is used to scale the desired application units into known values. All information for distance, velocity,
and accel/decel units are set up here and used throughout the system setup.
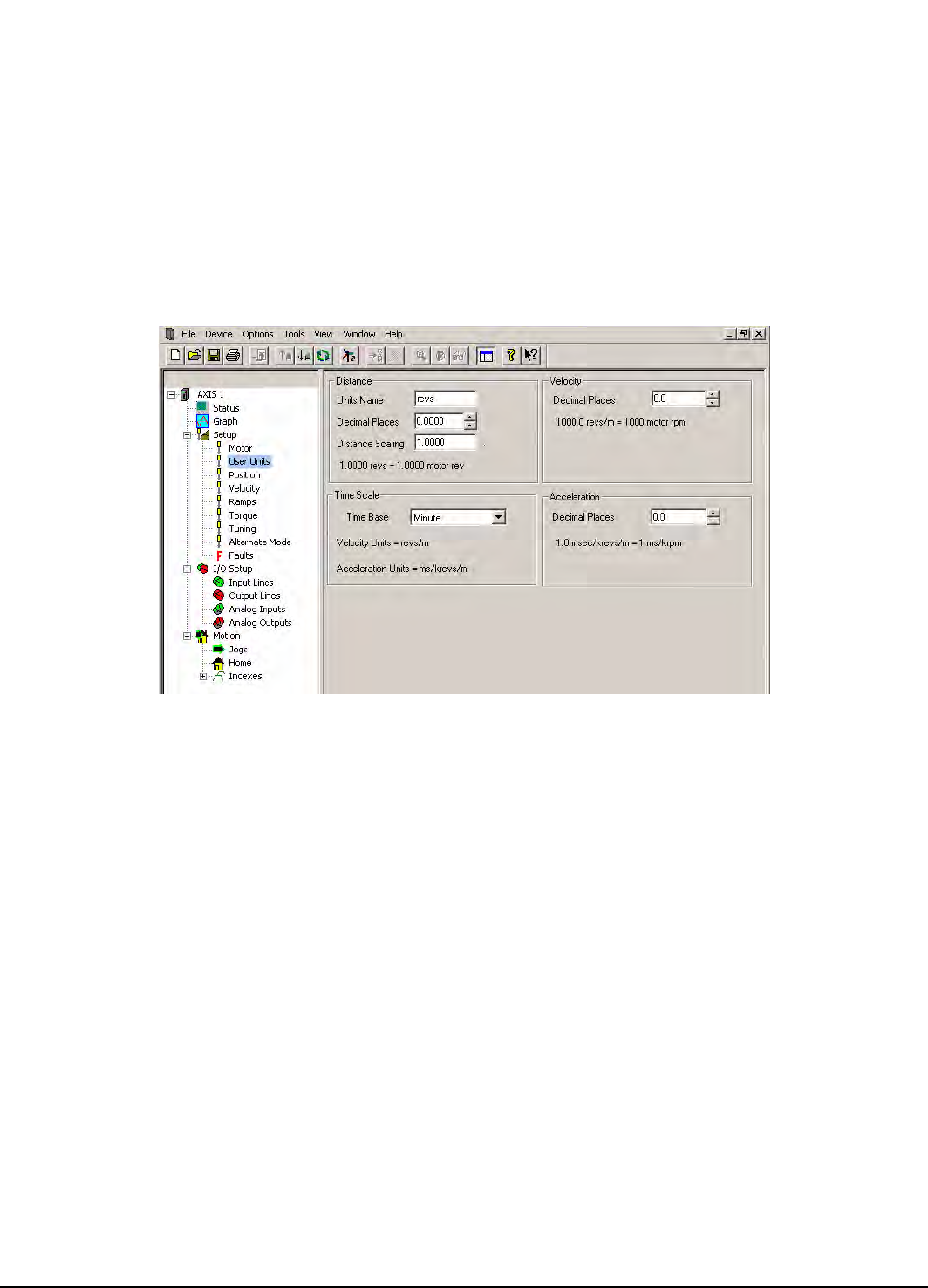
By selecting User Units in the Hierarchy Tree, the User Units View will appear on the right (see Figure 9).
Figure 9: User Units View
Distance Group
Units Name
Select the type of units to be used throughout the configuration for all Position/Distance parameters. The default units are
revs.
Decimal Places
This will specify the number of digits after the decimal place to be used in all distance/position parameters for the entire
configuration.
Distance Scaling
This will specify the number of user units in 1.0000 motor revolution. This parameter also determines the resolution of
distance/position parameters for the entire configuration. The number of decimal places specified here sets the maximum
resolution.
For Example: If the user has a leadscrew with a 0.5" lead and wishes to perform indexes of 0.025", the Units Scaling must be
set to 0.500. By specifying three digits after the decimal place, the user will be able to enter the three digits necessary for the
index distance.
Velocity Group
Decimal Places
This will specify the number of digits after the decimal place to be used in all Velocity parameters.