


















4-10 Input / Output MN1928
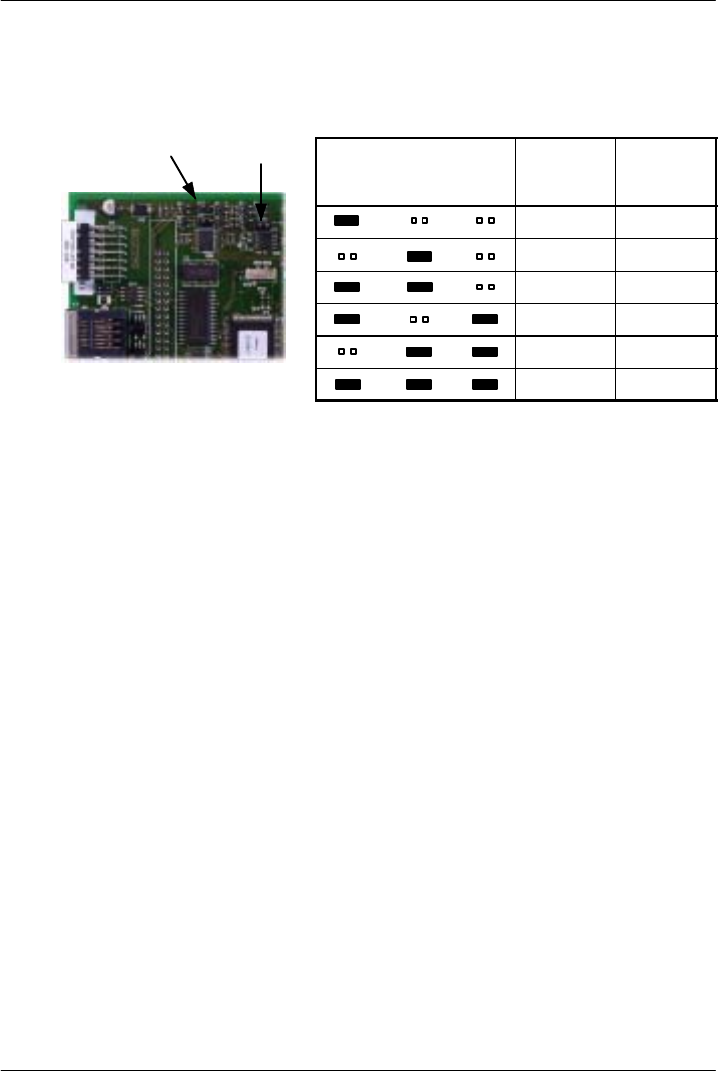
4.4.3 Error output - Error Out
The error output is available on pin b11. This 5V 100mA output can be used to stop external
equipment in the event of an error. The output level can be controlled using jumpers JP3, JP4
and JP5 as shown in Table 2. The jumpers are situated at the top edge of the card.
Jumpers
Inactive
s
t
a
t
e
Active
s
t
a
t
e
JP3 JP4 JP5
s
t
a
t
e
(no error)
s
t
a
t
e
(error)
Floating 5V
0V Floating
0V 5V
5V Floating
Floating 0V
5V 0V
Table 2 - Error Out level configuration
There are a number of methods for controlling the error output.
4.4.3.1 RELAY keyword
If the NextMove ES is connected to an opto-isolated backplane (optional) the output directly
controls the relay (see section 5.3.1.1). For this reason, the error output can be controlled by
the RELAY keyword. The command RELAY=1 will enable the error output; the command
RELAY=0 will disable it. This is true regardless of whether an opto-isolating backplane is
connected.
4.4.3.2 DRIVEENABLEOUTPUT keyword
The DRIVEENABLEOUTPUT keyword can be used to configure the error output as the drive
enable output. For example, the command DRIVEENABLEOUTPUT.1=_RELAY0 will mean
that the error output will be the drive enable output for axis 1. When axis 1 is enabled, the
error output will be activated and the axis enabled. If multiple axes are configured to use the
error output as their drive enable output, enabling one axis will enable all of them. Similarly, if
one axis is disabled, all will be disabled.
The RELAY keyword cannot control the error output if is configured as a drive enable output.
4.4.3.3 GLOBALERROROUTPUT keyword
By default, the error output is used as the global error output. In the event of an error on any
axis, the global error output will be deactivated. This action overrides the state of the error
output defined by other methods, such as the drive enable status or RELAY keyword.
Alternatively, the GLOBALERROROUTPUT keyword can be used to configure a general purpose
digital output to be the global error output.
See the MintMT help file for details of each keyword.
JP3
JP4
JP5