



















3 - 38
3 COMMON PARAMETERS
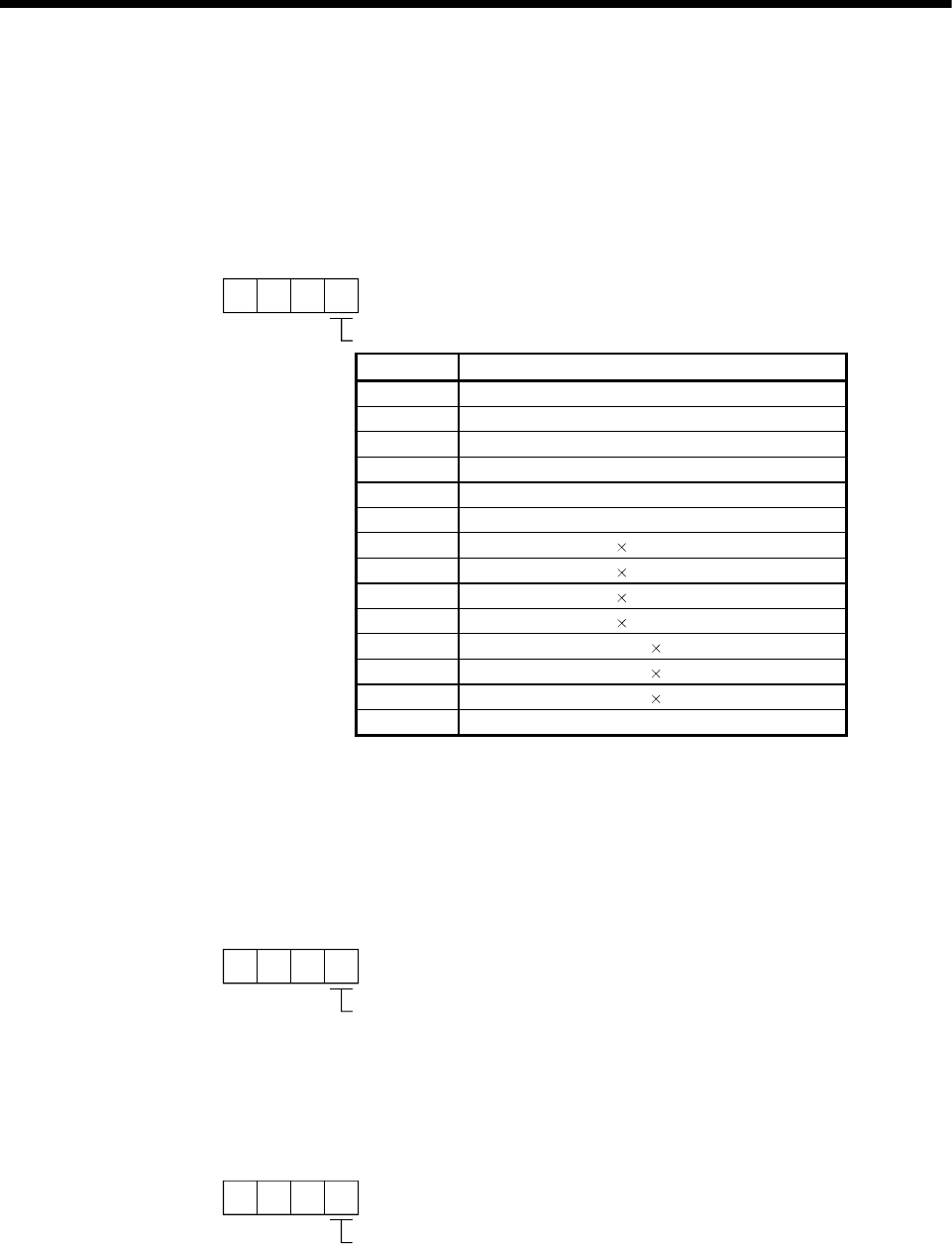
3.3.22 Analog monitor 2 output
This parameter is used to output the operating status of servo amplifier to analog
monitor in real time. The operating status can be checked by anaolg output.
This function is used to monitor the status of servo amplifier using an ammeter or
synchronize the torque/speed with the other servo amplifiers.
Set the signal provided to the analog monitor 1 output.
000
Analog monitor 2 output
Setting value Setting details
0 Servomotor speed (±8V/max. speed)
1 Torque (±8V/max. torque)
(Note-2)
2 Servomotor speed (+8V/max. speed)
3 Torque (+8V/max. torque)
(Note-2)
4 Current command (±8V/max. current command)
5 Speed command (±8V/max. speed command)
6 Droop pulses (±10V/1 10
2
[PLS])
(Note-1)
7 Droop pulses (±10V/1 10
3
[PLS])
(Note-1)
8 Droop pulses (±10V/1 10
4
[PLS])
(Note-1)
9 Droop pulses (±10V/1 10
5
[PLS])
(Note-1)
A Feedback position (±10V/1 10
6
[PLS])
(Note-1,3),
B Feedback position (±10V/1 10
7
[PLS])
(Note-1,3)
C Feedback position (±10V/1 10
8
[PLS])
(Note-1,3)
D Bus voltage (±8V/400V)
(Note-1): Encoder pulse unit
(Note-2): 8[V] is output at the maximum torque.
(Note-3): It can be used by the absolute (absolute position) system.
3.3.23 Function Selection C-4
This parameter is used to set the home position setting condition.
It is set when using the absolute position encoder.
000
Selection of home position setting condition
0: Need to pass motor Z phase after the power supply is switched on.
1: Not need to pass motor Z phase after the power supply is switched on.
3.3.24 Alarm history clear
This parameter is used to clear the alarm history.
000
Alarm history clear
0: Invalid
1: Valid
When alarm history clear is made valid, the alarm history is cleared at
next power-on. After the alarm history is cleared, the setting is automatically
made invalid (reset to 0).