



















3 - 36
3 COMMON PARAMETERS
3.3.17 Gain changing selection
This parameter is used to select the gain changing condition.
00
Gain changing selection
0: Invalid
Under any of the following conditions, the gains change based on the setting value of
servo parameter PB29 to PB32.
1: Control instructions from Motion CPU
2: Command frequency (Setting value of "PB27: Gain changing condition")
3: Droop pulse value (Setting value of "PB27: Gain changing condition")
4: Servomotor speed (Setting value of "PB27: Gain changing condition")
Gain changing condition
0: Valid at more than condition
(For control instructions from Motion CPU, valid with gain changing command ON)
1: Valid at less than condition
(For control instructions from Motion CPU, valid with gain changing command OFF)
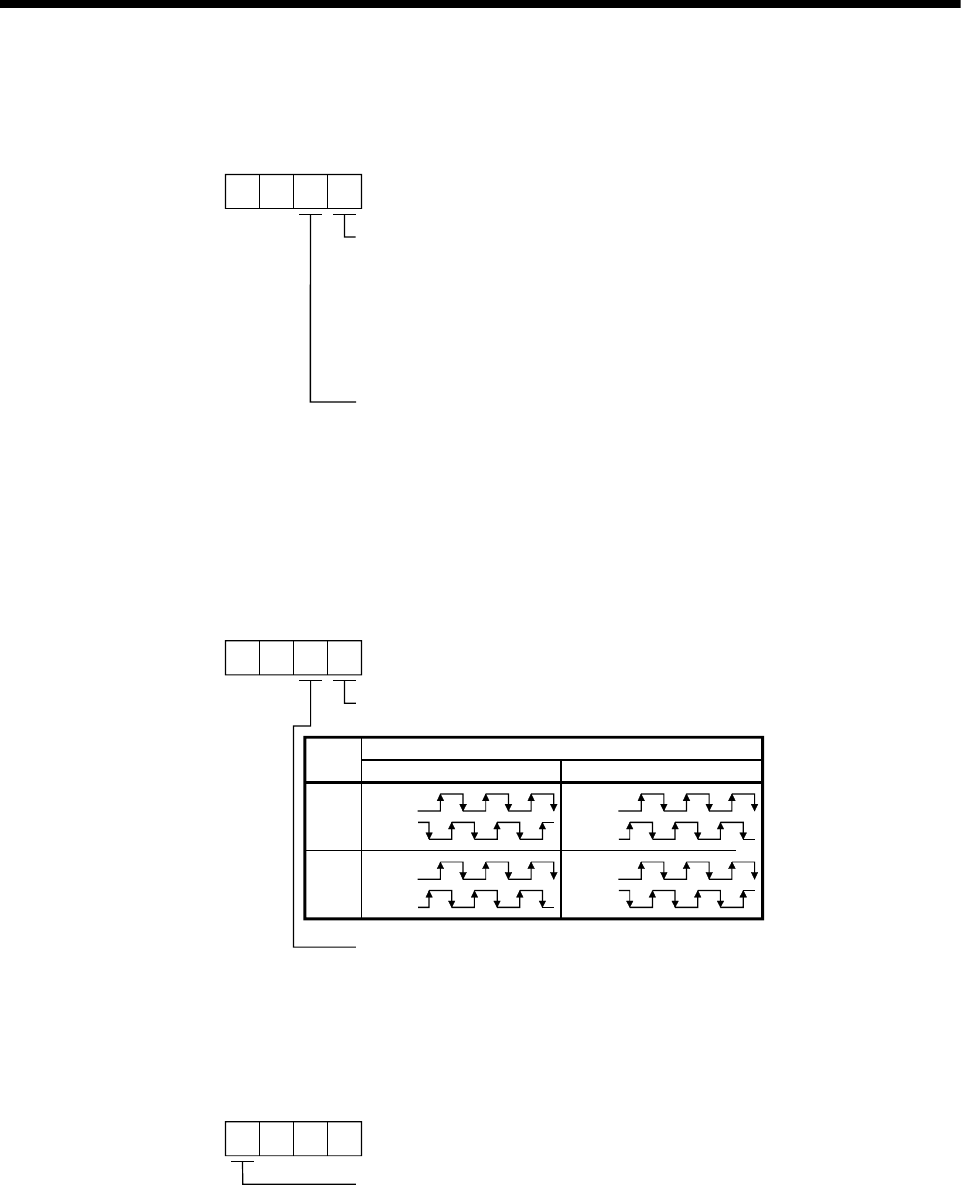
3.3.18 Encoder output pulse selection
This parameter is used to select the encoder output pulse direction and encoder pulse
output setting.
CCW CW
0
1
00
Encoder pulse output phase changing
Changing the phases of a, B-phase encoder pulses output.
Setting
value
Servomotor rotation direction
A-phase
B-phase
A-phase
B-phase
A-phase
B-phase
A-phase
B-phase
Encoder output pulse setting selection
0: Output pulse designation
1: Division ratio setting
3.3.19 Function selection C-1
This parameter is used to select the serial encoder cable.
00
MR-EKCBL30M-L
0
Serial encoder cable communication system selection
0: 2-wire type
1: 4-wire type
The following serial encoder cables are 4-wire type.
MR-EKCBL30M-H
MR-EKCBL40M-H
MR-EKCBL50M-H
The other all serial encoder cables are 2-wire type.
Incorrect setting will result in an encoder error 1 (Error code: 2016) or
encoder error 2 (Error code: 2020).