



















4 - 11
4 AUXILIARY AND APPLIED FUNCTIONS
4.3 High-Speed Reading of Specified Data
This function is used to store the specified positioning data in the specified device (D,
W). The signal from input module controlled in the Motion CPU is used as a trigger.
It can be set in the system setting of SW6RN-GSV
P.
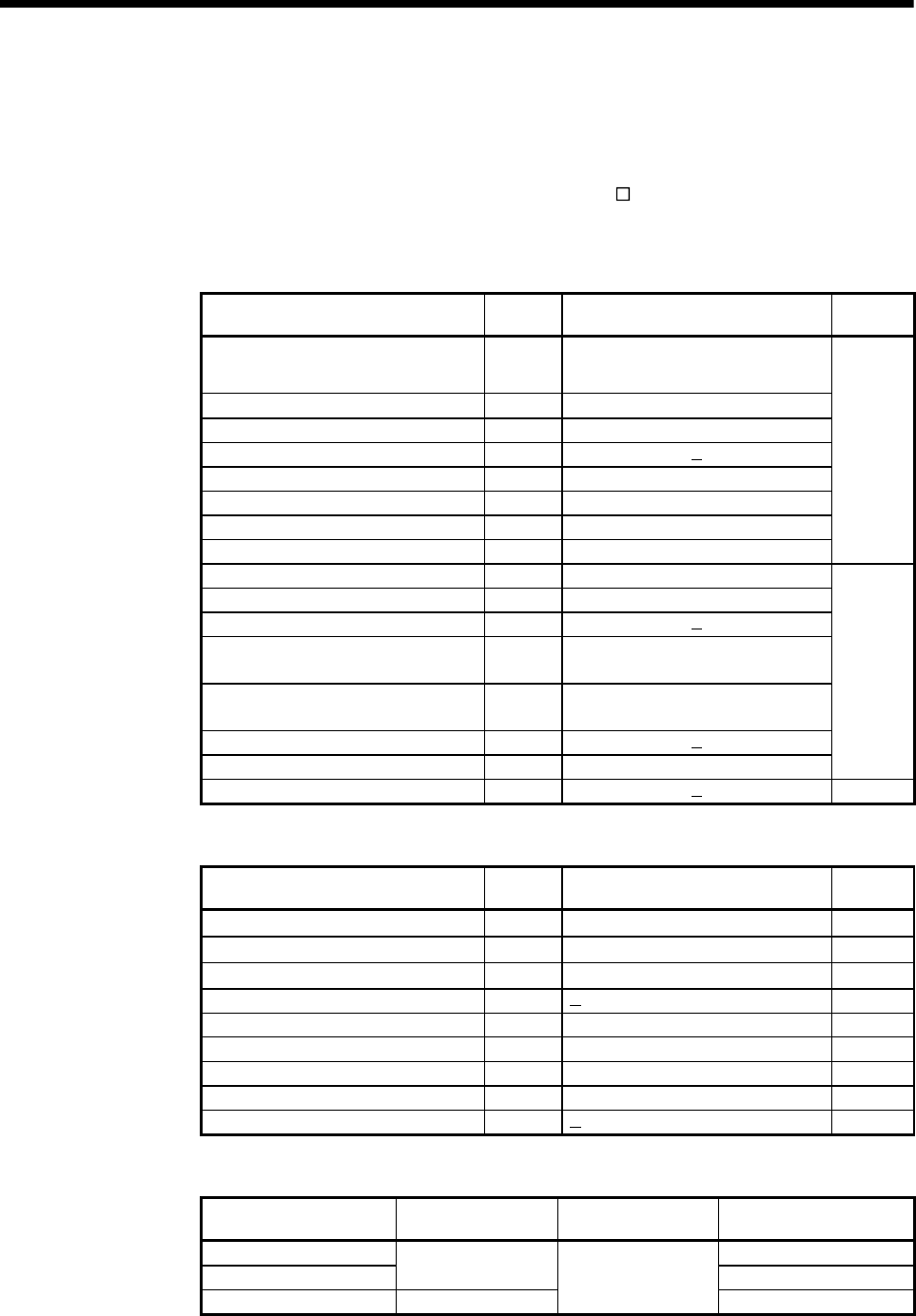
(1) Positioning data that can be set
(a) SV13/SV22
Setting data Word No. Unit Remarks
Position command (Feed current value) 2
10
-1
[
µ
m], 10
-5
[inch], 10
-5
[degree], [PLS]
Actual current value 2
10
-1
[
µ
m], 10
-5
[inch], 10
-5
[degree], [PLS]
Position droop (Deviation counter value) 2 [PLS]
M-code 1
Torque limit value 1 [%]
Motor current 1 [%]
Motor speed 2 [r/min]
Servo command value 2 [PLS]
Virtual servomotor feed current value 2 [PLS]
Synchronous encoder current value 2 [PLS]
Virtual servo M-code 1
Current value after main shaft
differential gear
2 [PLS]
Current value within one revolution of
cam axis
2 [PLS]
Execute cam No. 1
Execute stroke amount 2
10
-1
[
µ
m], 10
-5
[inch] [PLS]
Valid in
SV22
virtual
mode only
Optional address (Fixed to 4 bytes) 2
(b) SV43
Set data Word No. Unit Remarks
Position command (Machine value) 2 10
-4
[mm], 10
-5
[inch], 10
-5
[degree]
Real machine value 2
10
-4
[
mm
], 10
-5
[inch], 10
-5
[degree]
Position droop (Deviation counter value) 2
[PLS]
M-codes 1
Torque limit value 1 [%]
Motor current 1 [%]
Motor speed 2 [r/min]
Servo command value 2 [PLS]
Optional address (Fixed to 4 bytes) 2
(2) Modules and signals to be used
Input module Signal Read timing Number of settable points
Q172EX 2
Q173PX
TREN
3
PLC input module
(Note)
PX device
0.8[ms]
8
(Note) : Only one PLC input module can be used.