


















APPENDICES
APP
−
11
(6) MR-JCCBL
M-L/MR-JCCBL M-H
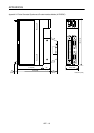
(a) Explanation of type
Type: MR-JCCBL M-
Symbol Cable Length [m]
2
5
10
20
30
2
5
10
20
30
SpecificationsSymbol
L
H
Standard flexing life
Long flexing life
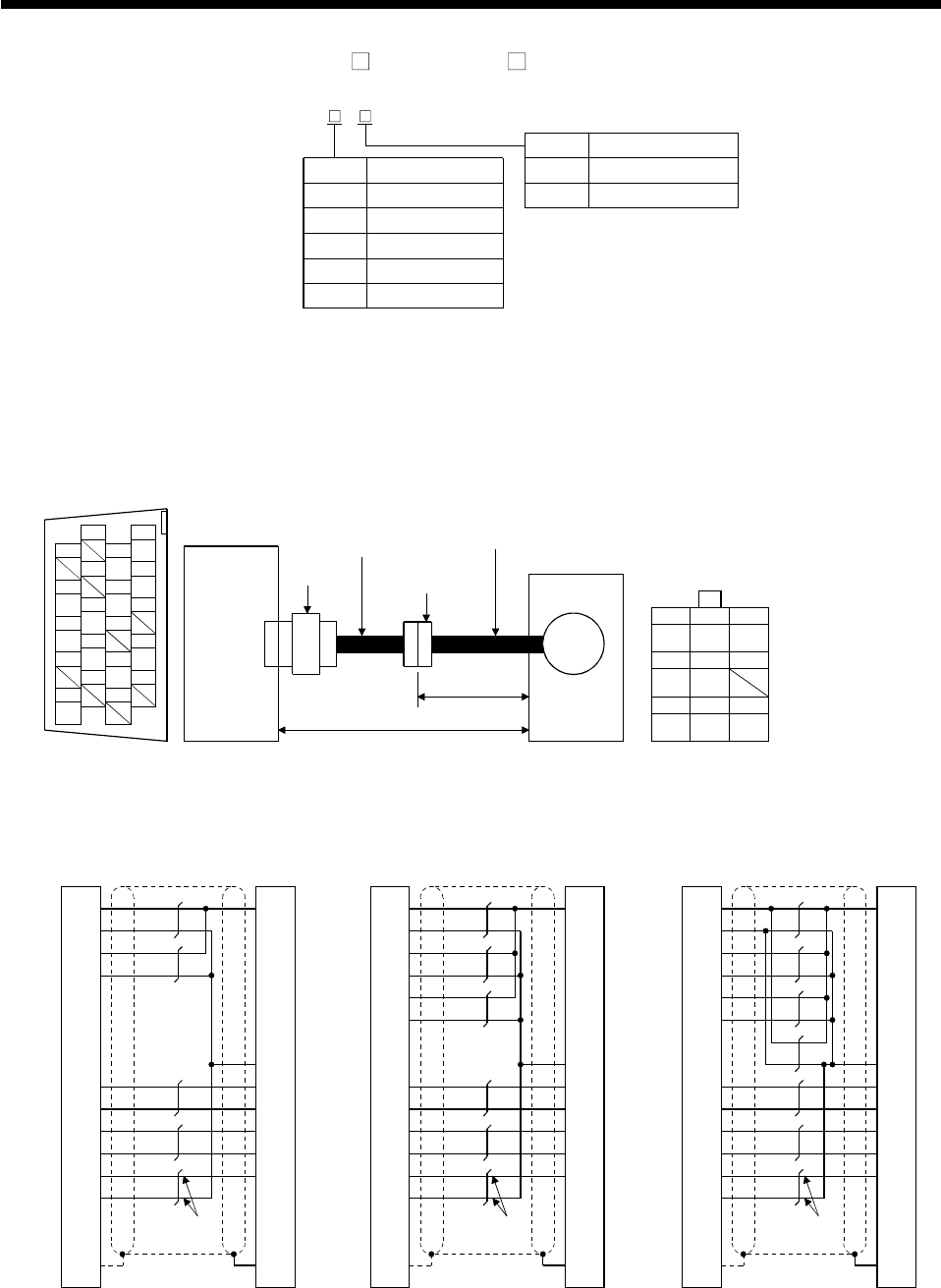
(b) Connection diagram
When fabricating a cable, use the recommended wire and encoder cable
fabricating connector set given on Appendix 1.2 (1), and make the cable as
shown in the following connection diagram. This connection allows you to
fabricate an up to 30m length of cable including the encoder cable supplied
to the servo motor.
LG
1
MRR
P5
3
5
7
9
LG
2
MR
P5
4
6
8
10
11
LG
P5
13
15
17
19
12
BAT
P5
14
16
18
SD
20
Servo amplifier connector
Servo amplifier
Encoder cable
(Optional or fabricated)
Encoder connector
Servo motor
50m max.
EncoderCN2
MR-JCCBL2M-L, MR-JCCBL5M-L,
MR-JCCBL2M-H, MR-JCCBL2M-H
MR-JCCBL10M-L to MR-JCCBL30M-L MR-JCCBL10M-H to MR-JCCBL30M-H
Encoder side
1-172161-9
(plug)
170359-1
(connector pin)
Servo amplifier side
10120-3000VE
(connector)
10320-52F0-008
(shell kit)
19
P5
11LG
20
P5
12LG
7
MR
7
8
1
2
3
9
17MRR
18
P5
2LG
9BAT
PlateSD
1LG
6MD
16MDR
4
5
*1
Encoder side
1-172161-9
(plug)
170359-1
(connector pin)
Servo amplifier side
10120-3000VE
(connector)
10320-52F0-008
(shell kit)
19
P5
11LG
20
P5
12LG
7
MR
7
8
1
2
3
9
17MRR
18
P5
2LG
9BAT
PlateSD
1LG
6MD
16MDR
4
5
*1
Encoder side
1-172161-9
(plug)
170359-1
(connector pin)
Servo amplifier side
10120-3000VE
(connector)
10320-52F0-008
(shell kit)
19
P5
11LG
20
P5
12LG
7
MR
7
8
1
2
3
9
17MRR
18
P5
2LG
9BAT
PlateSD
1LG
6MD
16MDR
4
5
*1
*1: Always make connection for use in an absolute position detection system.
Wiring is not needed for use in an incremental system.
MR-HCNS2
30cm
Encoder cable supplied
to servo motor
P5
7
MD
4
MR
1
LG
8
MDR
5
MRR
2
SHD
9
6
BAT
3
Encoder connector
172161-9(AMP make)