

















1. LINEAR ENCODER
1 - 4
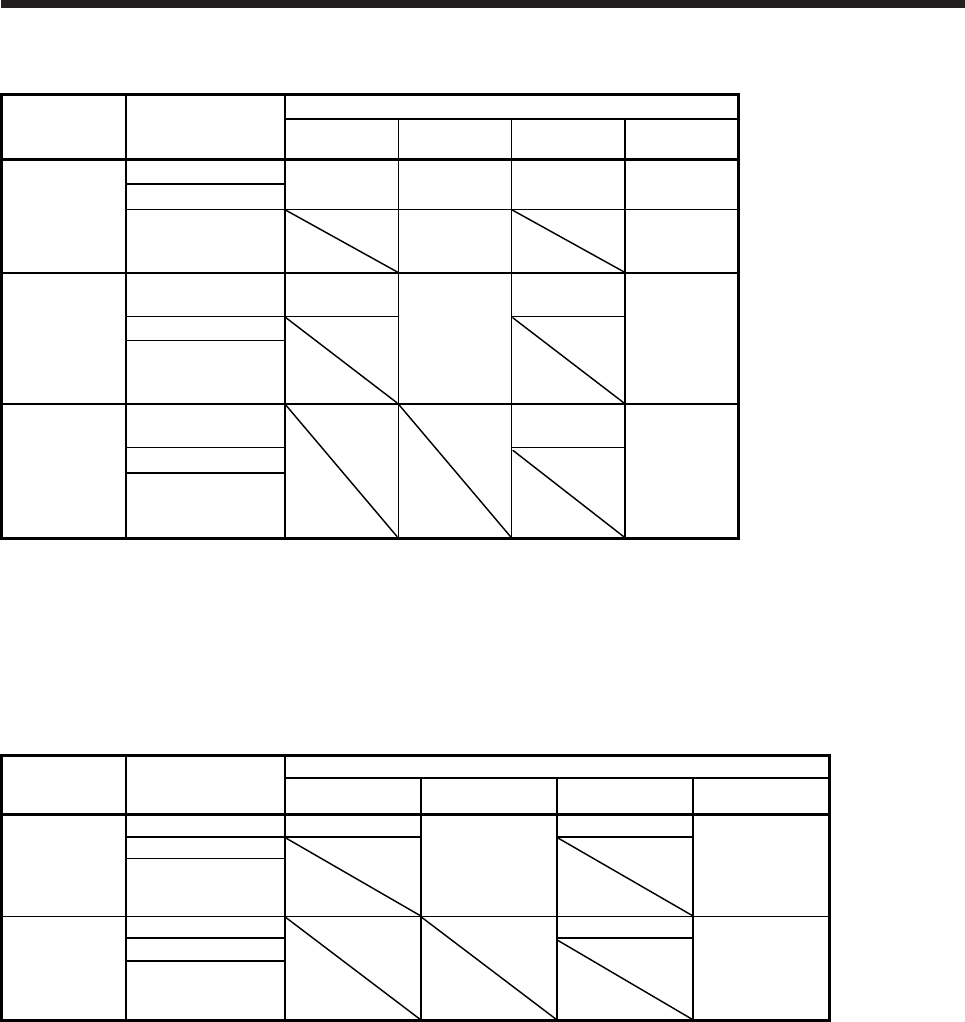
(2) For an MR-J4-_A4(-RJ) and MR-J4-_B4(-RJ) servo amplifiers
Operation
mode
External encoder
communication
method
External connection connector
MR-J4-_A4 MR-J4-_A4-RJ MR-J4-_B4 MR-J4-_B4-RJ
Linear servo
motor system
Two-wire type
CN2
(Note 1)
CN2
(Note 1)
CN2
(Note 1)
CN2
(Note 1)
Four-wire type
A/B/Z-phase
differential output
method
CN2L
(Note 5)
CN2L
(Note 5)
Fully closed
loop system
Two-wire type
CN2
(Note 2, 3)
CN2L
CN2
(Note 2, 3)
CN2L
Four-wire type
A/B/Z-phase
differential output
method
Scale
measurement
function
Two-wire type
CN2
(Note 2, 3, 4)
CN2L
(Note 4)
Four-wire type
A/B/Z-phase
differential output
method
Note 1. The MR-J4THCBL03M branch cable is necessary.
2. The MR-J4FCCBL03M branch cable is necessary.
3. When the communication method of the servo motor encoder is four-wire type, MR-J4-_A4 and MR-J4-_B4 cannot be used.
Use an MR-J4-_A4-RJ or MR-J4-_B4-RJ.
4. Supported by servo amplifiers with software version A8 or above.
5. Connect a thermistor to CN2.
(3) For an MR-J4-DU_A_(-RJ) and MR-J4-DU_B_(-RJ) drive units
Operation
mode
External encoder
communication
method
External connection connector
MR-J4-DU_A_ MR-J4-DU_A_-RJ MR-J4-DU_B_ MR-J4-DU_B_-RJ
Fully closed
loop system
Two-wire type CN2 (Note 1, 2)
CN2L
CN2 (Note 1, 2)
CN2L
Four-wire type
A/B/Z-phase
differential output
method
Scale
measurement
function
Two-wire type
CN2 (Note 1, 2)
CN2L
Four-wire type
A/B/Z-phase
differential output
method
Note 1. The MR-J4FCCBL03M branch cable is necessary.
2. When the communication method of the servo motor encoder is four-wire type, MR-J4-DU_A_ and MR-J4-DU_B_ cannot be
used. Use an MR-J4-DU_A_-RJ or MR-J4-DU_B_-RJ.