



















1. LINEAR ENCODER
1 - 33
1.3.3 LIDA 483, LIDA 485, LIDA 487, LIDA 489, LIDA 287, LIDA 289, LIF 481, or LIP 581 + EIB 392M
(incremental type)
POINT
This linear encoder is of four-wire type. When using this linear encoder, change
the parameter to select the four-wire type. For changing parameters, refer to
each servo amplifier instruction manual.
When using a linear encoder of four-wire type with fully closed loop control, use
an MR-J4-(DU)_A_-RJ/MR-J4-(DU)_B_-RJ.
When using a linear encoder of four-wire type with scale measurement function,
use an MR-J4-(DU)_B_-RJ.
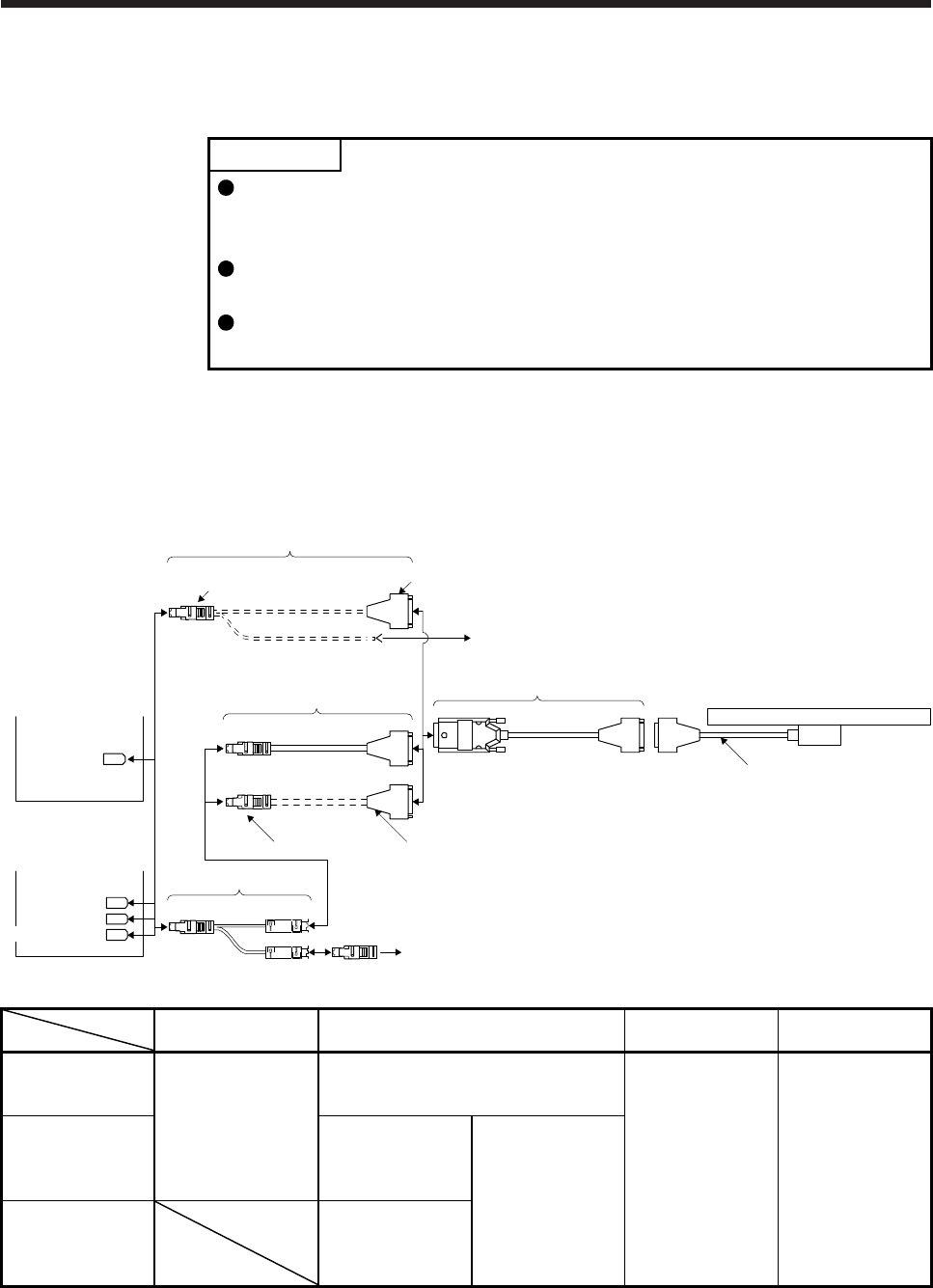
(1) Cable composition
Prepare a cable based on the following configuration diagram.
(a) For the linear servo motor
1) MR-J4-_A_, MR-J4-_B_, or MR-J4W_-_B servo amplifier
Encoder cable 1
Thermistor of linear servo motor
Branch cable
MR-J4W_-_B
servo amplifier
MR-J4-_A_
or
MR-J4-_B_
servo amplifier
THM
or
(Note 3)
1)
Linear encoder
LIDA 483, LIDA 485, LIDA 487,
LIDA 489, LIDA 287, LIDA 289,
LIF 481, or LIP 581 + EIB 392M
Head cable
3)
2)
Serial interface conversion unit
CN2B
CN2A
CN2
CN2C
CN2 4) SCALE
Thermistor of linear servo motor
3)
5)
Encoder cable 2
(Note 1)
Branch cable Encoder cable
Serial interface
conversion unit
Head cable
When using an
optional encoder
cable
4) MR-J4THCBL03M
(Refer to section
2.4.)
1) Options manufactured by Heidenhain
(Note 2)
630 856-×× _m
EIB 392M
Cable length: 0.5 m
(Heidenhain)
(Note 2)
Accessories for
linear encoder
Cable length: 3 m
When fabricating
the encoder cable
2) Connector set
MR-J3CN2
(Refer to (2) (a)
of this section.)
3) Junction
connector
(Note 2)
D-SUB15 pin
(female)
When not using a
branch cable
5) Connector set
MR-J3CN2
(Refer to (2) (b)
of this section.)
Note 1. The connection to CN2C is for the MR-J4 3-axis servo amplifier. MR-J4 2-axis servo amplifier does not have CN2C.
2. It should be prepared by the customer.
3. For connectors for thermistor signals, change how to connect depending on the customer's system.