

















2. OPTION CABLE/CONNECTOR SETS
2 - 4
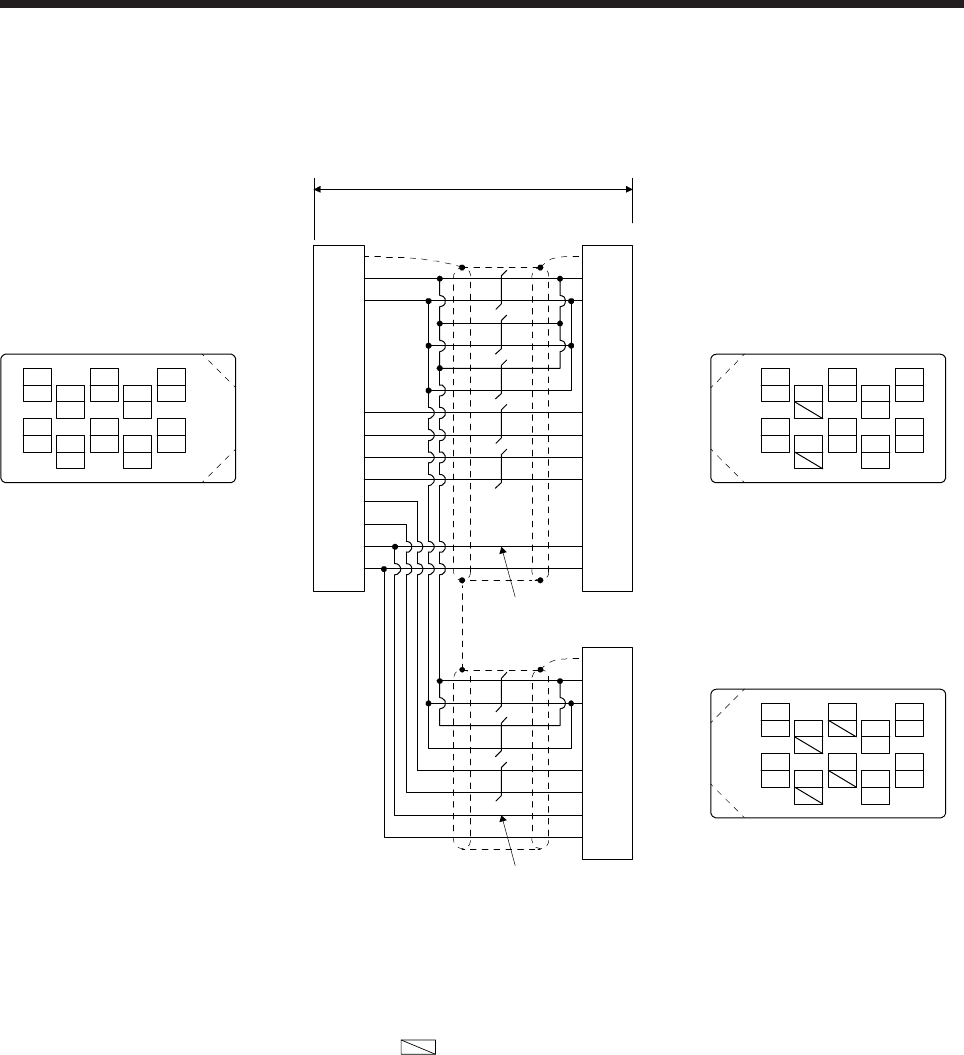
2.5 MR-J4FCCBL03M branch cable
This branch cable is for connecting the encoder of rotary servo motor and the load-side encoder to CN2
connector. When fabricating the branch cable using MR-J3THMCN2 connector set, refer to App. 2.
LG
View seen from wiring side. (Note 5)
4
MRR
2
LG
8
6
1
P5
5
10
3
MR
7
9
THM2
THM1
MXR
SEL
THM2
THM1
SEL
MX
BAT
SD
3
4
1
CN2 MOTOR
Plate
(Note 1) (Note 2)
0.3 m
MR
P5
MRR
SD
MR
P5
MRR
3
4
1
Plate
View seen from wiring side. (Note 5)
4
MRR
2
8
6
1
P5
5
10
3
MR
7
9
View seen from wiring side. (Note 5)
4
2
8
6
15
10
37
9
BAT
2
THM2 6
7
MX
LG LG2
MXR 8
BAT
SEL
9
10
5THM1 5 THM1
6 THM2
9 BAT
10 SEL
SCALE
(Note 2)
P5
SD
SEL
LG
1
2
10
Plate
4 MXR
BAT9
3MX
BAT
SEL
LG
P5
MXR
MX
(Note 3)
(Note 4)
(Note 4)
Note 1. Receptacle: 36210-0100PL, shell kit: 36310-3200-008 (3M)
2. Plug: 36110-3000FD, shell kit: 36310-F200-008 (3M)
3. Connect MX to MR of the linear encoder cable, and MXR to MRR of the cable.
4.
A
lways make connection for use in an absolute position detection system. Wiring is not necessary for use in an incremental
system.
5. Do not connect anything to the pins shown as
. Especially, pin 10 is for manufacturer adjustment. If it is connected with
any other pin, the servo amplifier cannot operate normally. Referring POINT of chapter 1, securely connect the external
conductor of the shielded cable to the ground plate and fix it to the connector shell.