



















209
Functions for Servo Drivers Compatible with Absolute Encoders Section 7-7
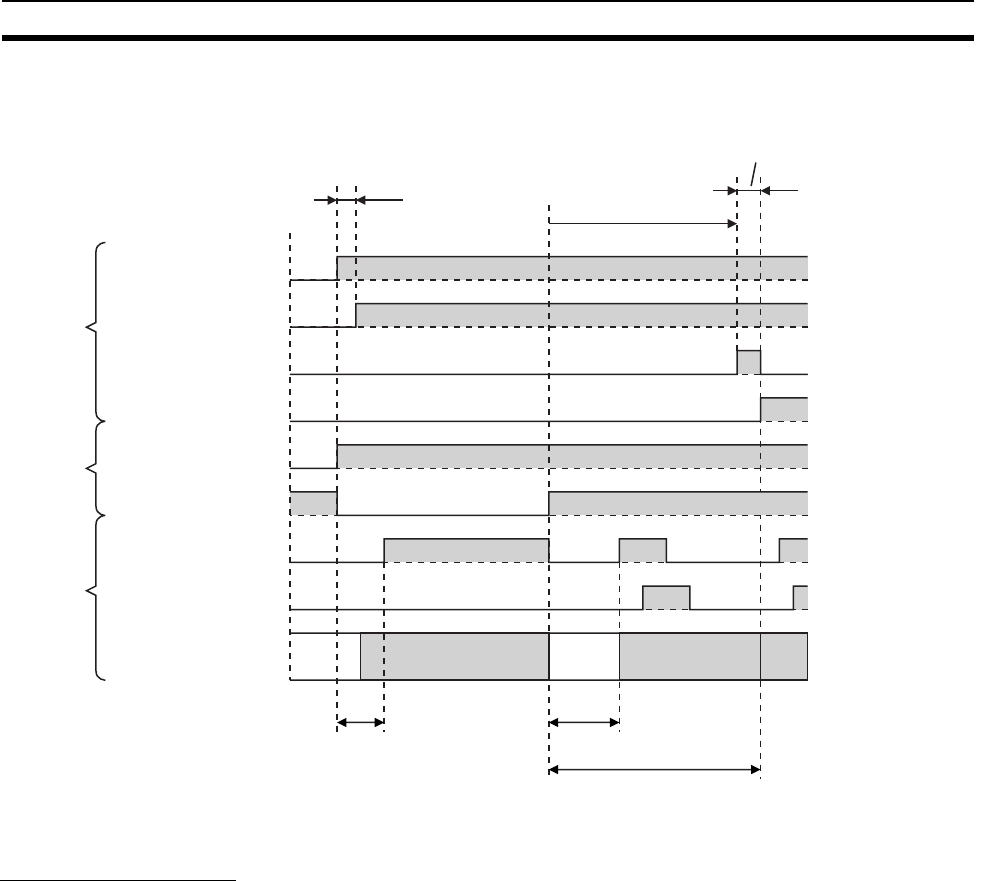
7-7-11 Timing Chart of the Functions for Servo Drivers Compatible with
Absolute Encoders
7-7-12 Sample Programs (Connecting an OMRON W-series Servo Driver)
Program Description
1,2,3... 1. With the Motion Control Module set to MONITOR mode, turning ON
CIO 0000.01 (absolute origin define) presets the absolute origin as the ab-
solute offset.
2. With the Motion Control Module set to MONITOR mode, turning ON
CIO 0000.00 (absolute servo operation start) presets the absolute present
value in A600 and A601.
Counter value is not changed
while reading rotation data.
Min: (50+60) ms
Typ: (50+90) ms
Max: (50+260) ms
1 to 3 ms
Preset after 30 to 62.5 ms
50 ms
RUN Signal Output Bit
Absolute No. of Rotations
Read (A610.07)
High-speed Counter Start Bit
(A610.00)
Absolute PV Preset Bit
(A610.06)
SEN output
Phase A
Phase B
Absolute Present value
ON during 1 cycle
Initial incremental pulses
30 to 62.5 ms
User program
processing
Signals from
Servo Driver
The
latest
value
Absolute No. of Rotations
Read Completed Flag
If the absolute No. of
rotations read was
successful, SEN output
stays ON.
The high-speed counter
starts 50 ms after start of
the absolute No. of
rotations read.
Perform absolute PV preset
within 30 to 50 ms after the
read is completed.
Rotation data:
Motion
Control
Module's
internal
processing
Serial data (rotation data)
approx.15 ms