



















202
Functions for Servo Drivers Compatible with Absolute Encoders Section 7-7
Absolute Circular Counter The absolute encoder’s pulse information is counted using a circular counter.
(Only the initial incremental pulse (angle) reading is used as the absolute
value.)
7-7-5 Absolute Number of Rotations PV (Counter 1: A604 and A605)
The multi-turn data (a present value read from an encoder) is input to the
Motion Control Module after the SEN signal is input to a Servo Driver. The
data is stored as the absolute number of rotations present value. The stored
value is determined by the following conversion formulae:
Absolute number of rotations PV (A604 and A605) = R
× M
Number of initial incremental pulses (A600 and A601) = P
0
M: Multi-turn data (meaning how many times the axis of a rotary encoder
rotated)
R (System Setup: ABS encoder resolution): The number of pulses for en-
coder's one revolution
(Absolute encoder's resolution set on Servo Driver x phase differential in-
put multiplication of the Motion Control Module (System Setup: Counter 1
Input))
P
0
: The number of initial incremental pulses
P
s
: Absolute offset
When the absolute number of rotations value is read, the number of initial
incremental pulses portion is stored in A600 and A601.
7-7-6 Absolute Present Value
The absolute present value is calculated by subtracting an absolute offset
from the absolute encoder's state (position) when the SEN signal was turned
ON.
The value is calculated using the following formulae and is used for the abso-
lute present value preset function. It is not stored in the memory as data.
Absolute Linear
Counter
Absolute PV = Absolute number of rotations PV (A604 and A605) + Number
of initial incremental pulses (A600 and A601)
− P
s
P
s
: Absolute offset
Absolute Circular
Counter
Absolute PV = P
0
− P
s
P
0
: The number of initial incremental pulses
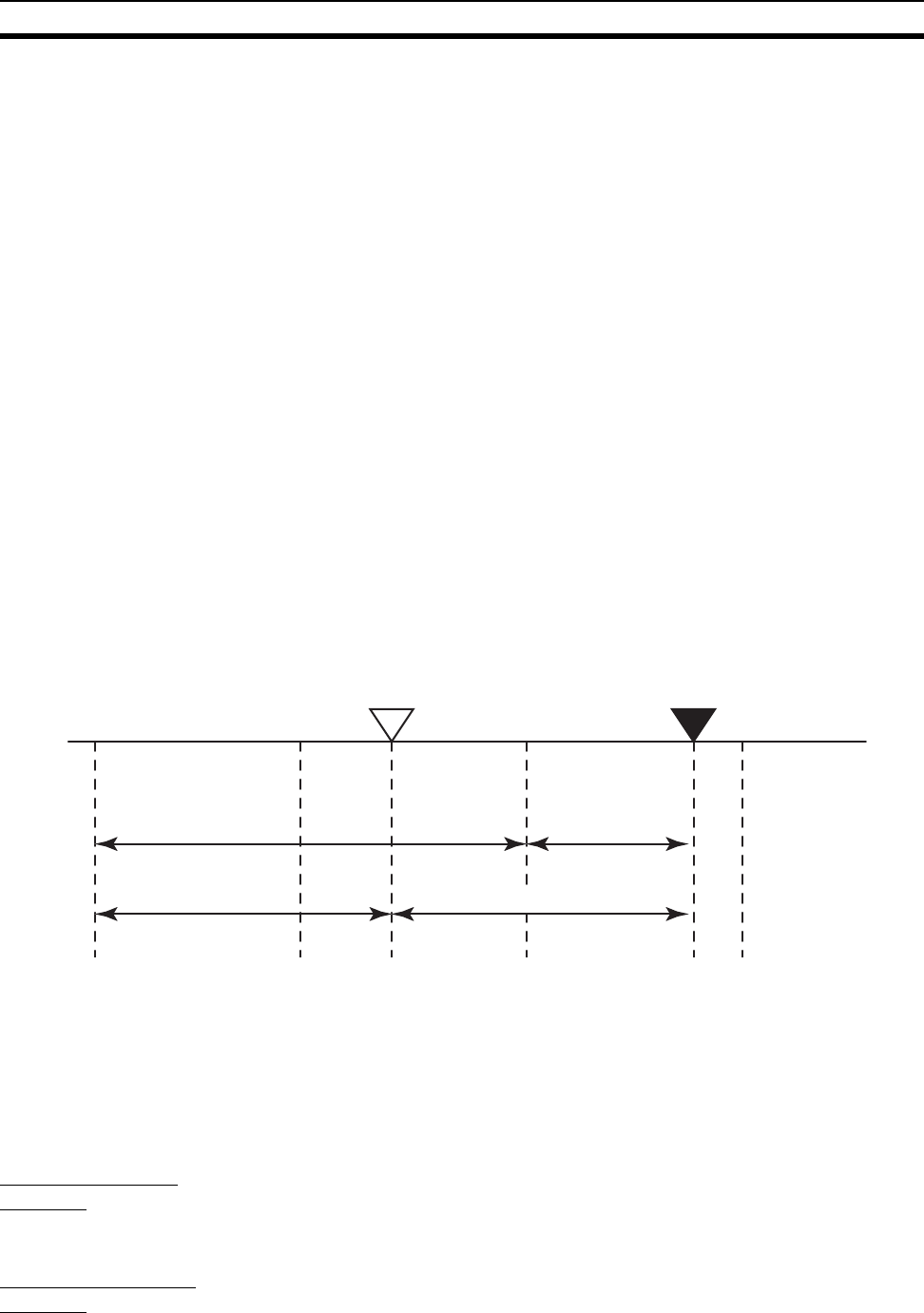
0+1 +2 +3
M
Reference position
(Absolute offset position)
Absolute Number of Rotations Present Value
(A604 and A605) + P
0
(A600 and A601)
Absolute encoder's position)
M × R
P
0
P
s
Absolute Present Value