



















4 • Chapter 1 Overview DMC-1700/1800
17X8
The DMC-1718, 1728, 1738, 1748 controllers have 64 additional general I/O points. The user can
configure these I/O points as inputs or outputs in blocks of 8.
1X80
The DMC-1750 through DMC-1780 and DMC-1850 through DMC-1880 controllers provide interface
circuitry for 16 optoisolated inputs, 8 TTL inputs, 16 TTL outputs, and 8 analog inputs with 12-bit
ADC (16-bit optional).
System Elements
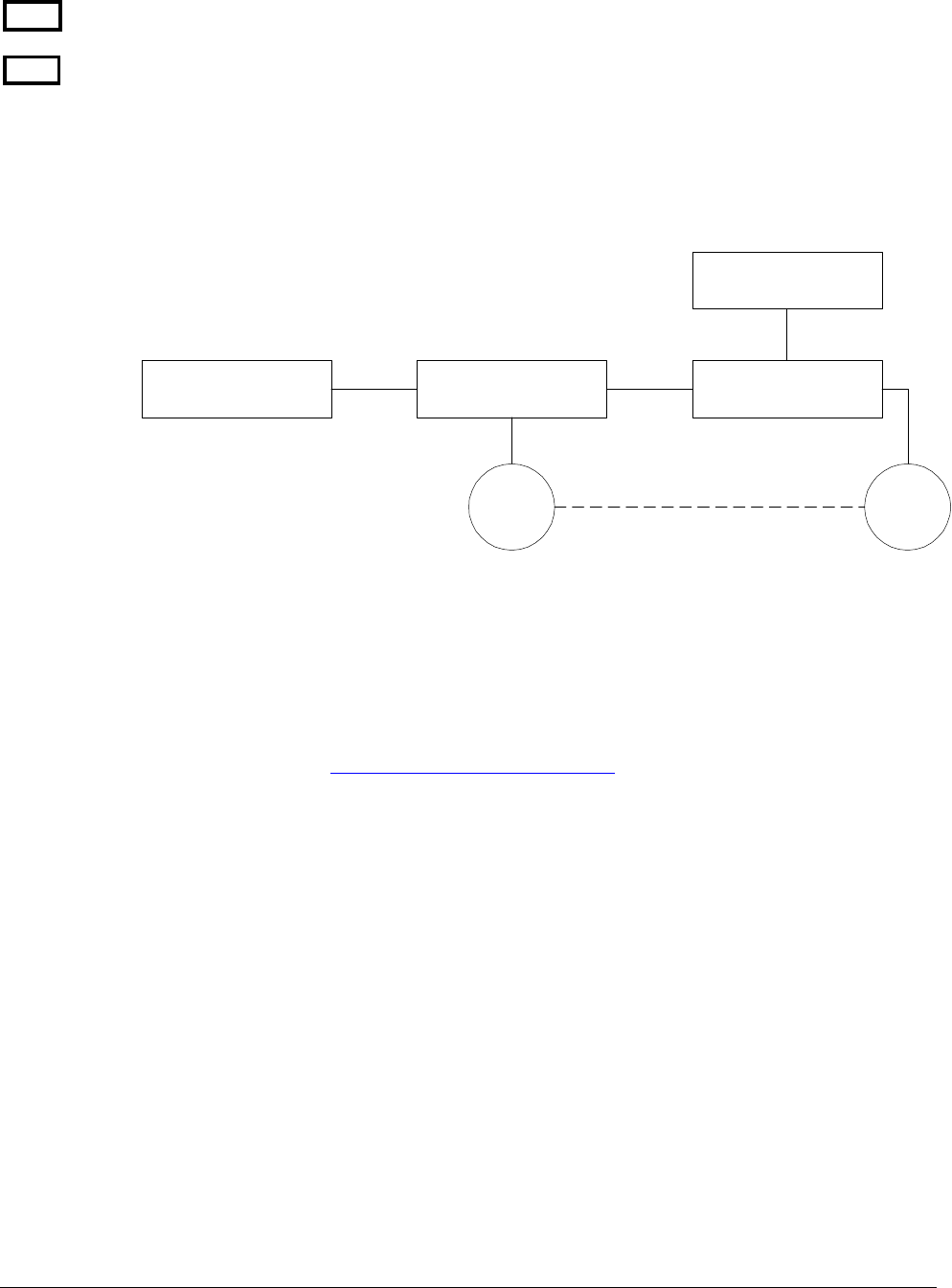
As shown in Fig. 1.2, the DMC-1700/1800 is part of a motion control system which includes amplifiers, motors, and
encoders. These elements are described below.
Computer
DMC-1700/1800
Controller
Driver
Power Supply
Encoder Motor
Figure 1.2 - Elements of Servo systems
Motor
A motor converts current into torque, which produces motion. Each axis of motion requires a motor sized properly
to move the load at the required speed and acceleration. (Galil’s “Motion Component Selector” software can help
you with motor sizing). Download at
www.galilmc.com/support/download, select “MCS”.
The motor may be a step or servo motor and can be brush-type or brushless, rotary or linear. For step motors, the
controller can operate full-step, half-step, or microstep drives. An encoder is not required when step motors are
used.
Amplifier (Driver)
For each axis, the power amplifier converts a +/-10 Volt signal from the controller into current to drive the motor.
For stepper motors, the amplifier converts step and direction signals into current. The amplifier should be sized
properly to meet the power requirements of the motor. For brushless motors, an amplifier that provides electronic
commutation is required or the controller must be configured to provide sinusoidal commutation. The amplifiers
may be either pulse-width-modulated (PWM) or linear. They may also be configured for operation with or without
a tachometer. For current amplifiers, the amplifier gain should be set such that a 10 Volt command generates the
maximum required current. For example, if the motor peak current is 10A, the amplifier gain should be 1 A/V. For
velocity mode amplifiers, 10 Volts should run the motor at the maximum speed.
Encoder
An encoder translates motion into electrical pulses which are fed back into the controller. The DMC-1700/1800
accepts feedback from either a rotary or linear encoder. Typical encoders provide two channels in quadrature,
known as CHA and CHB. This type of encoder is known as a quadrature encoder. Quadrature encoders may be