



















199
Functions for Servo Drivers Compatible with Absolute Encoders Section 7-7
• Starting instruction: ACC(888) (continuous or independent), deceleration, absolute
circular
7-7 Functions for Servo Drivers Compatible with Absolute
Encoders
7-7-1 Applicable Models
The examples in this section demonstrate the functions with high-speed
counter 1 only. When using high-speed counter 2, replace the Auxiliary Area
addresses with the appropriate addresses for high-speed counter 2.
7-7-2 Overview
Either of the following types of pulse input signals can be input to the unit:
• Pulse trains from normal incremental encoders, etc.
• Encoder output data (e.g., OMRON's W Series) of Servo Drivers compat-
ible with absolute encoders (multi-turns absolute encoders)
The following explains the functions that are compatible with the latter, Servo
Drivers compatible with absolute encoders.
Note Refer to 7-5 Pulse Inputs for details on pulse train inputs from devices such as
normal incremental encoders
To input the encoder output data from a Servo Driver compatible with an
absolute encoder, the SEN output signal from the Motion Control Module has
to be connected to the Servo Driver. When starting an operation, the number
of multi-turns (to phase A as serial data) and the initial incremental pulse (to
phase A/B as pulse) are input once as the absolute position information.
After that, the position data during operations are input with the phase differ-
ential input (using normal counter functions).
Using a Servo Driver compatible with an absolute encoder enables the con-
trolled operation to be started from the position at turning on the power with-
out performing any origin searches.
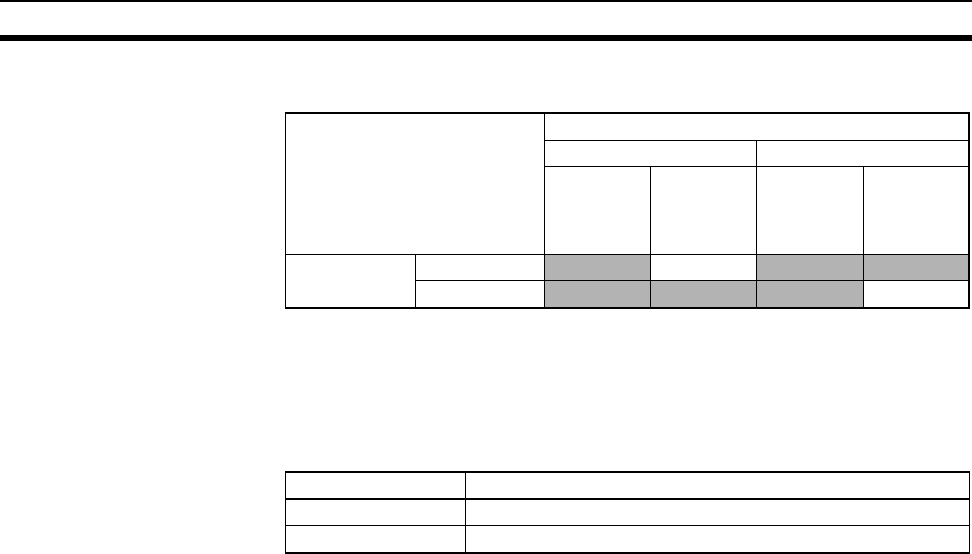
Output status Direction and starting conditions
CW CCW
Target
position >
Present
position
Target
position <
Present
position
Target
position >
Present
position
Target
position <
Present
position
Absolute cir-
cular
CW output
No Yes No No
CCW output
No No No Yes
Model Functions
FQM1-MMP21 Motion Control Module for Pulse I/O
FQM1-MMA21 Motion Control Module for Analog I/O