



















DMC-3425 Chapter 6 Programming Motion• 81
Example:
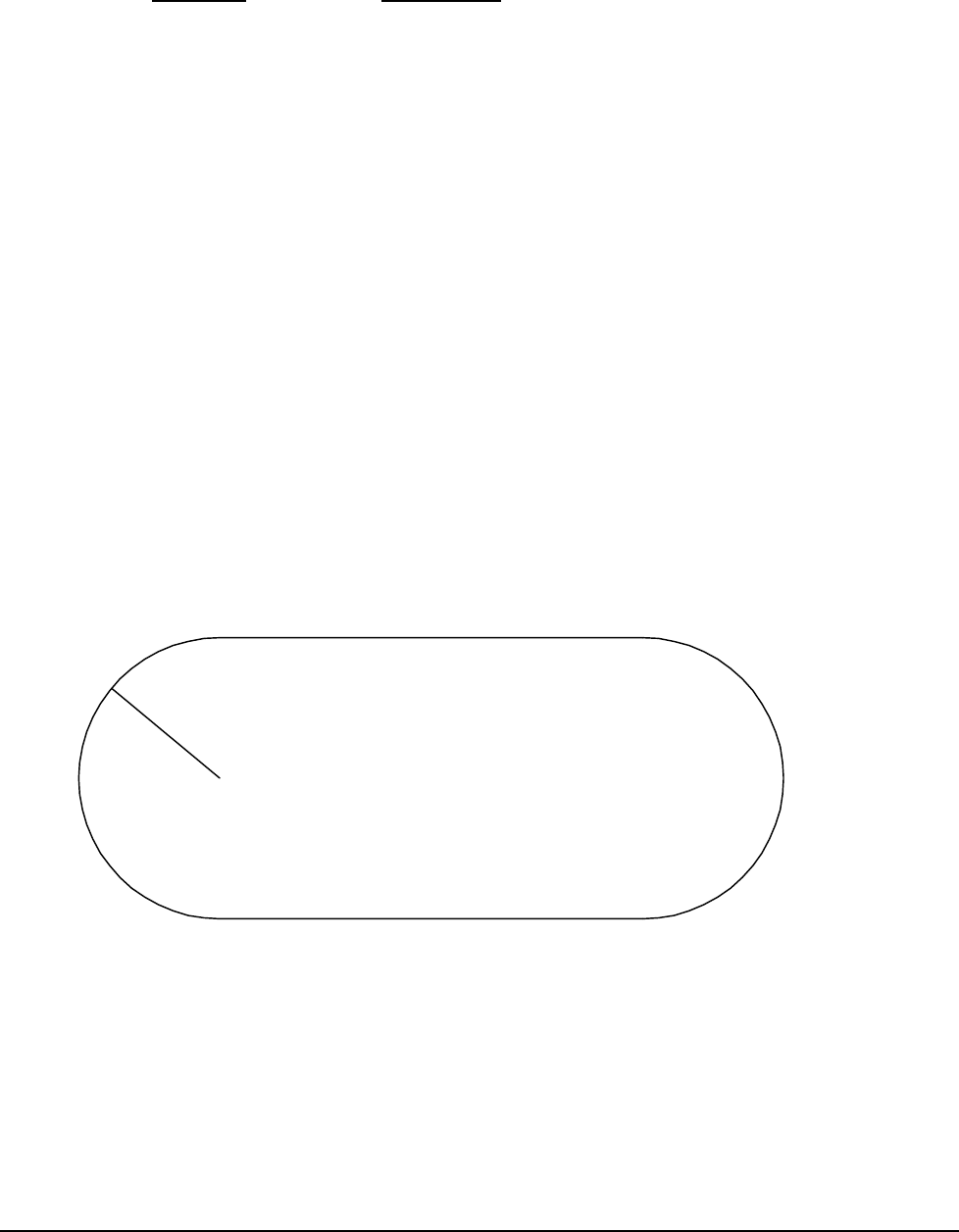
Traverse the path shown in Fig. 6.3. Feedrate is 20000 counts/sec. Plane of motion is AB
Instruction
Interpretation
VM AB Specify motion plane
VS 20000 Specify vector speed
VA 1000000 Specify vector acceleration
VD 1000000 Specify vector deceleration
VP -4000,0 Segment AB
CR 1500,270,-180 Segment BC
VP 0,3000 Segment CD
CR 1500,90,-180 Segment DA
VE End of sequence
BGS Begin Sequence
The resulting motion starts at the point A and moves toward points B, C, D, A. Suppose that we
interrogate the controller when the motion is halfway between the points A and B.
The value of _AV is 2000
The value of _CS is 0
_VPA and _VPB contain the absolute coordinate of the point A
Suppose that the interrogation is repeated at a point, halfway between the points C and D.
The value of _AV is 4000+1500
π+2000=10,712
The value of _CS is 2
_VPA, _VPB contain the coordinates of the point C
C (-4000,3000)
R = 1500
B (-4000,0)
D (0,3000)
A (0,0)
Figure 6.3 - The Required Path