



















68 • Chapter 6 Programming Motion DMC-3425
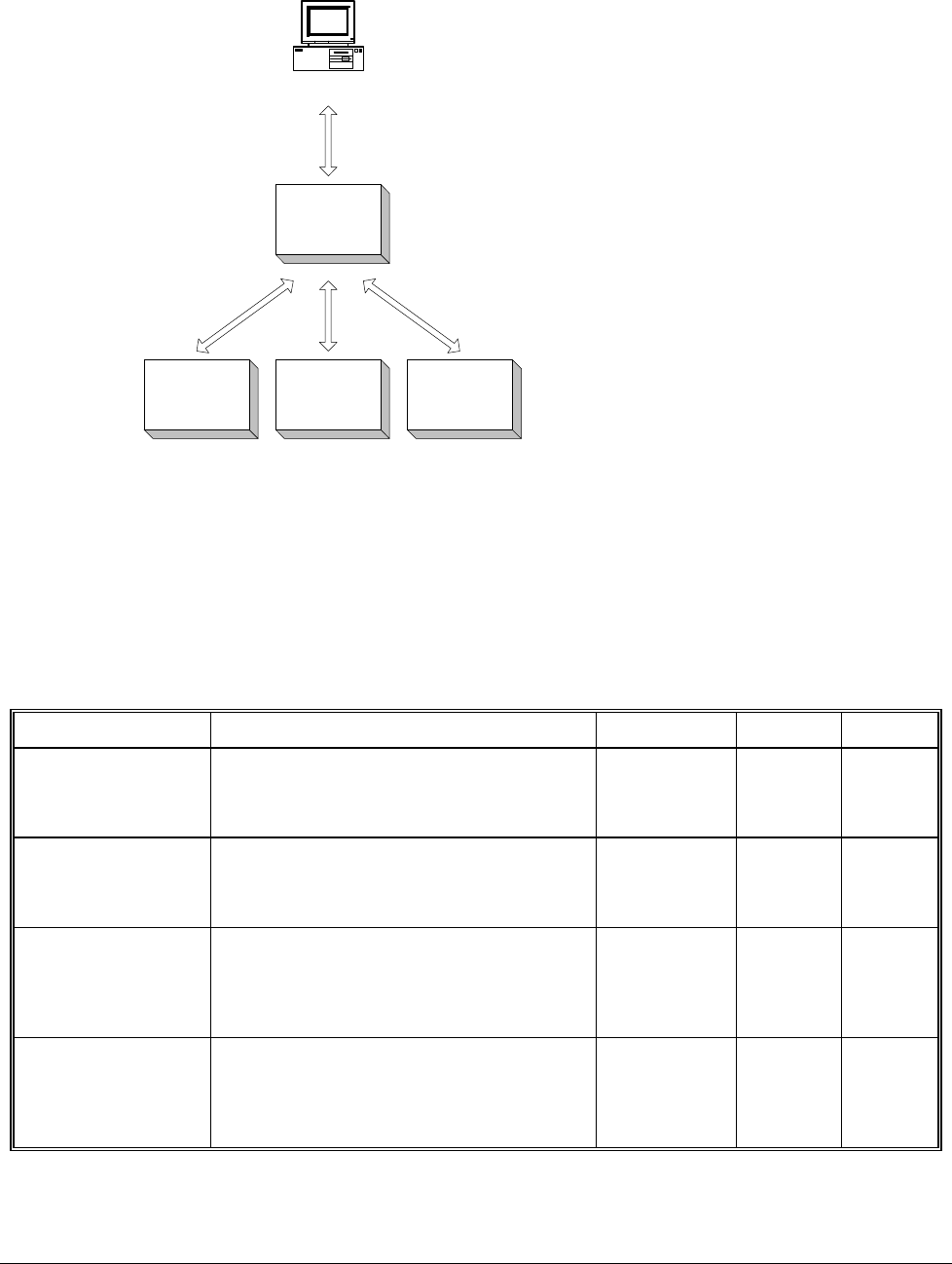
Host Computer
DMC-3425
C and D
Axes
DMC-3425
A and B
Axes
DMC-3425
E and F
Axes
DMC-3425
G and H
Axes
GLOBAL OPERATION
RS-232
or
Ethernet
Ethernet
The controllers may operate under both Local and/or Global mode. In general, operating in Global
mode simplifies controlling the entire system. However, Local Mode operation is necessary in some
situations; Using local mode for setup and testing is useful since this isolates the controller. Specific
modes of motion require operation in Local Mode. Also, each controller can have a program,
including the slave controllers. When a slave controller has a program, this program would always
operate in Local mode.
The following table describes the modes of motion and whether this mode will work in Global or
Local Mode:
Mode of Motion Basic description Commands Global LOCAL
Relative Independent
Axis Positioning
Each axis operates independently and motion is
specified with a relative distance, velocity,
acceleration and deceleration. The axis follows the
prescribed velocity profile.
PR, AC, DC, SP YES YES
Absolute Independent
Axis Positioning
Each axis operates independently and motion is
specified with an absolute position, velocity,
acceleration and deceleration. The axis follows the
prescribed velocity profile.
PA, AC, DC, SP YES YES
Independent Jogging
Each axis operates independently and the axis
follows a prescribed velocity profile with no final
endpoint. The motion is specified with velocity,
acceleration and deceleration. Motion stops on Stop
command.
JG
AC, DC
ST
YES YES
Linear Interpolation
2 thru 8 axes of coordinated motion. The path is
described by linear incremental segments and vector
velocity, vector acceleration and vector
deceleration. The vector motion follows the
prescribed velocity profile.
LM
LI, LE
VS, VA, VD
NO YES