Calculating the Moment of Inertia
AdeptSix 300CR Robot Instruction Handbook, Rev. A 57
Example 2
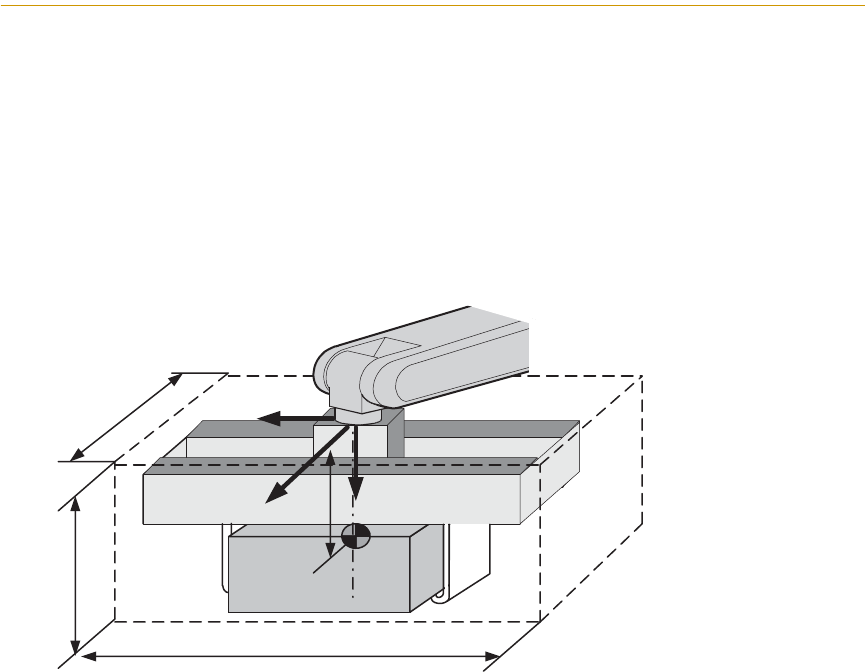
It is necessary to set the moment of inertia at the center of gravity when the entire size of
the tool and workpiece are large compared with the distance from the tool flange relative
to the position of the center of gravity. See Figure 5-7.
Roughly calculate the moment of inertia at the center of gravity based on “Example 1” on
page 54, using the hexahedron and cylinder concept for the entire tool.
Figure 5-7. Center of Gravity: Large Tool and Workpiece Example
Tooling Details
• W:100.000 kg
• Xg:0.000 mm
• Yg:0.000 mm
• Zg:250.000 mm
• lx:10.000 kg.m²
• ly:3.500 kg.m²
• lz: 10.500 kg.m²
Weight: W=55 + 40 = 95, approximated to 100 kg.
Center of gravity: Z offset position (Xg, Yg, Zg) = (0, 0, 250)
Moment of inertia at the center of gravity:
• The hexahedron of 0.500 x 0.400 x 1.000(m), which encloses the entire tool
including the assumed workpiece.
• Use the following formula to calculate the moment of inertia of a hexahedron.
lx = (Ly²*Lz²/12) * W = ((0.400²+1.000²)/12) * 100=9.667 Approx. 10.000
ly = (Lx²*Lz²/12) * W = ((0.500²+0.400²)/12) * 100=3.417 Approx. 3.500
lz = (Lx²*Ly²/12) * W = ((0.500²+1.000²)/12) * 100=10/417
Weight of Hand:
Approx. 55 kg
Weight of Workpiece:
Approx. 40 kg
250
1000
400
500
XF
ZF
YF











































































































