



















DMC-1700/1800 Chapter 10 Theory of Operation • 195
1
4
0.1
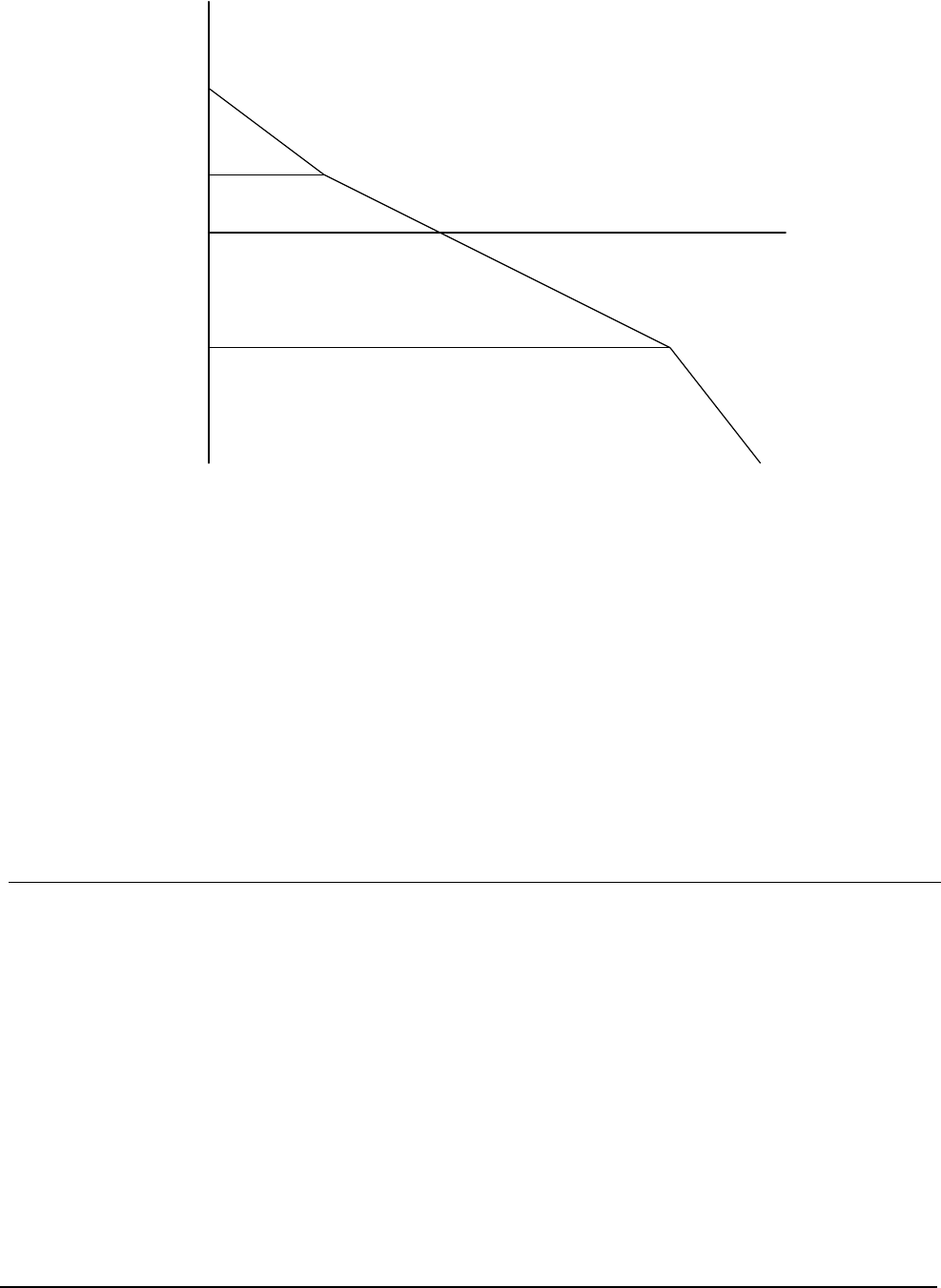
50 200 2000 W (rad/s)
Magnitude
Figure 10.8 - Bode plot of the open loop transfer function
For the given example, the crossover frequency was computed numerically resulting in 200 rad/s.
Next, we determine the phase of A(s) at the crossover frequency.
A(j200) = 390,000 (j200+51)/[(j200)
2
. (j200 + 2000)]
α = Arg[A(j200)] = tan
-1
(200/51)-180° -tan
-1
(200/2000)
α = 76° - 180° - 6° = -110°
Finally, the phase margin, PM, equals
PM = 180
°
+
α
= 70
°
As long as PM is positive, the system is stable. However, for a well damped system, PM should be between 30
degrees and 45 degrees. The phase margin of 70 degrees given above indicated overdamped response.
Next, we discuss the design of control systems.
System Design and Compensation
The closed-loop control system can be stabilized by a digital filter, which is preprogrammed in the DMC-1700/1800
controller. The filter parameters can be selected by the user for the best compensation. The following discussion
presents an analytical design method.
The Analytical Method
The analytical design method is aimed at closing the loop at a crossover frequency, ω
c
, with a phase margin PM.
The system parameters are assumed known. The design procedure is best illustrated by a design example.
Consider a system with the following parameters: