



















3 - 33
3 COMMON PARAMETERS
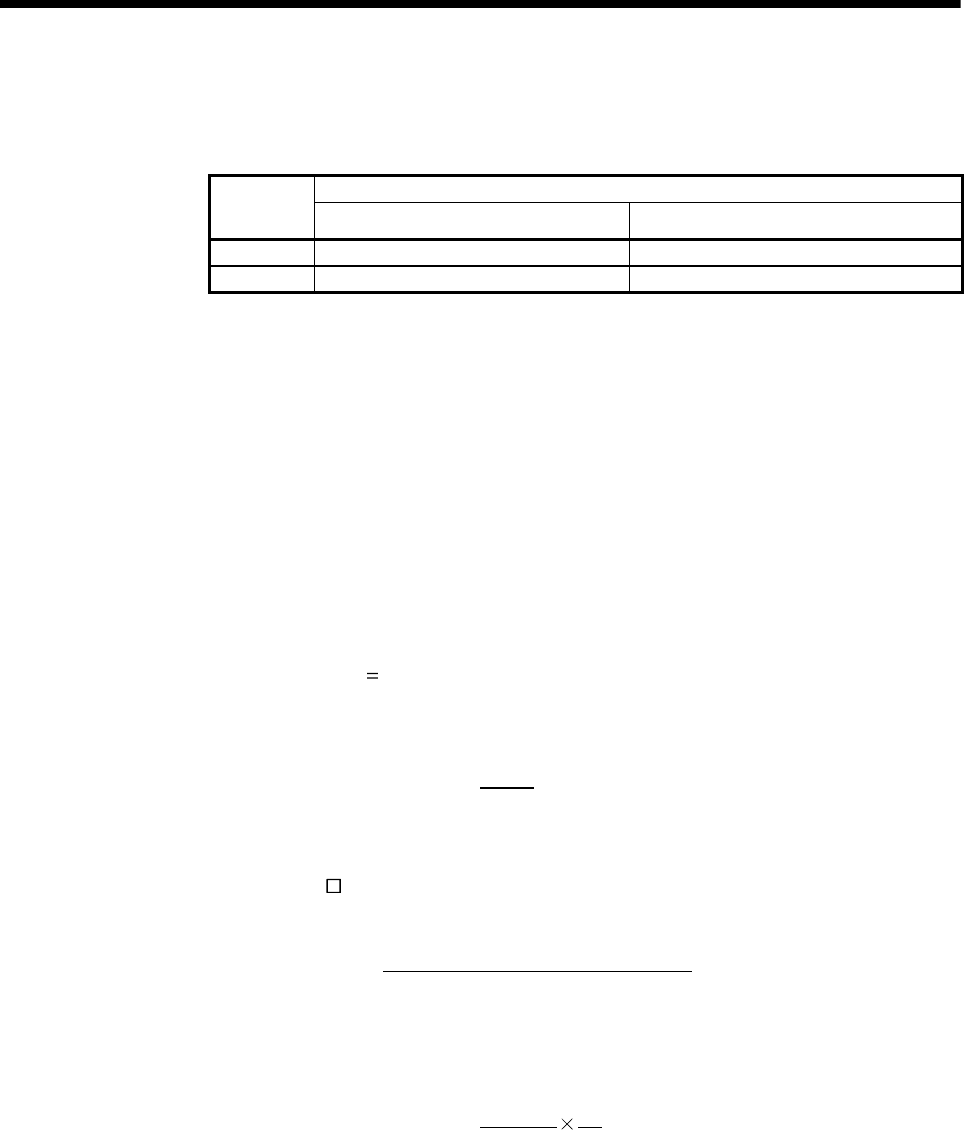
3.3.8 Rotation direction selection
This parameter is used to set the rotation direction at load side of the servomotor.
Servomotor rotation direction
Setting value
When positioning address increases When positioning address decreases
0 CCW CW
1 CW CCW
3.3.9 Encoder output pulse
This parameter is used to set the encoder pulses (A-phase, B-phase) output by the
servo amplifier. Set the value 4 times greater than the A-phase or B-phase pulses.
Setting range is 1 to 65535[PLS/rev].
"PC03: Encoder output pulse selection" can be used to select the output pulse setting
or output division ratio setting. The number of A/B-phase pulses actually output is 1/4
times greater than the preset value. The maximum output frequency is 4.6[Mpps] (after
multiplication by 4). Use this parameter within this range.
(1) For output pulse designation
Set "0000h" (initial value) to "PC03: Encoder output pulse selection".
Set the number of pulses per servomotor revolution.
Output pulse
Setting value [PLS/rev]
For example, set "5600h" to "PA15: Encoder output pulse", the actually output
A/B-phase pulses are shown below.
5600
A/B-phase output pulses =
4
=
1400[PLS]
(2) For output division ratio setting
Set "001
h" (initial value) to "PC03: Encoder output pulse selection".
The number of pulses per servomotor revolution is divided by the setting value.
Resolution per servomotor revolution
Output pulse =
Setting value
[PLS/rev]
For example, set "8h" to "PA15: Encoder output pulse", the actually output A/B-
phase pulses are shown below:
262144 1
A/B-phase output pulses =
8 4
=
8192[PLS]