



















Parker Hannifin
Chapter 6 Command Reference 99
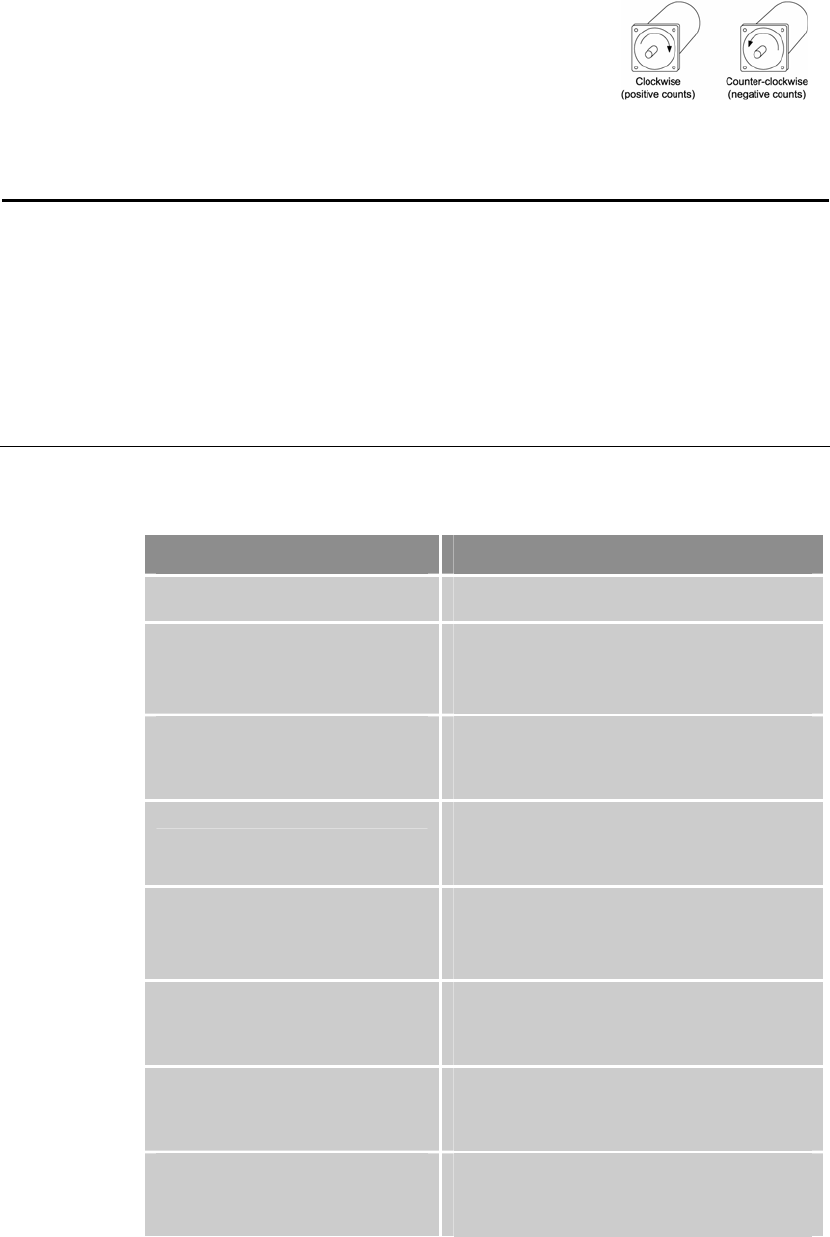
Rotary Motors—Positive values represent
clockwise motion and negative values represent
counter-clockwise motion (assuming CMDDIR = Ø,
and that you connected the feedback device
according to instructions provided in “Chapter 2
Mech
anical Installation” and “Chapter 3 Electrical
Ins
tallation”).
Figure 41 Clockwise/
Counter-clockwise rotation
CONFIG
Configuration Errors and Warnings
Type
Error Handling
Product Rev
Syntax
<a_>CONFIG
Aries 1.0
Units
N/A
Range
N/A
Default
N/A
Response
CONFIG <*>No Errors
See Also
DMTIC, DMTIND, DMTIP, DMTW, ERROR
The CONFIG command gives a text-based status report of current
configuration errors and warnings (EØ through E24).
Error Resolution
EØ—Motor Configuration
Warning
The motor rating is too high for the drive, and the
drive is using its own limits for safety reasons.
E1—Motor Configuration Error
One of the motor parameters is set to zero (0).
Look at the additional errors to find which
parameters are set at zero (0). Refer to your
motor specifications for the correct value.
E3—Max Inductance = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero (0) value. Refer to
your motor specifications for the correct value.
(DMTIND)
E4—Rated Speed = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero value. Refer to
your motor specifications for the correct value.
(DMTW)
E5—DPOLE = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero value. Refer to
your motor specifications for the correct value.
(DPOLE)
E6—Resistance = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero value. Refer to
your motor specifications for the correct value.
(DMTRES)
E7—Ke = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero value. Refer to
your motor specifications for the correct value.
(DMKE)
E8—Continuous Current = Ø
This parameter is set to zero (0). To correct the
error, you must set a non-zero value. Refer to
your motor specifications for the correct value.
(DMTIC)