



















Parker Hannifin
Chapter 6 Command Reference 131
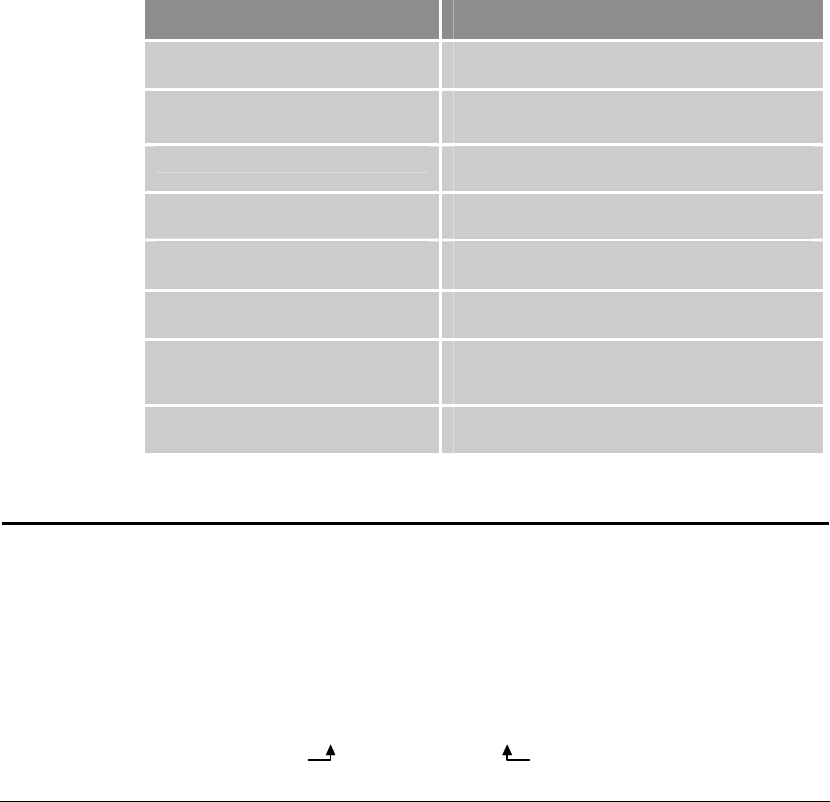
Error Description
E45-Excessive Velocity Error
Commanded velocity. Actual Velocity is greater
than the value set by SMVER.
E46-Hardware Enable
0 = Hardware Enable (Drive I/O Pin 1 and 21)
1 = No Hardware Enable
E47-Low Voltage Enable
No motor power was present when the drive was
enabled.
E48-Control Power Active
The drive is in Control power mode. No motor
power is present.
E49-Alignment Error
The ALIGN command did not complete
successfully. (TPE, THALL)
E50-Flash Error
A problem writing to non-volatile memory exists.
(RFS).
E51-Resolver Error
A problem determining the correct resolver angle
exists. Applies to Arxx-xR models only. Check the
resolver feedback wiring.
E52-Encoder Loss Fault
The drive determined there was loss of feedback.
Check the feedback wiring. (TPE, THALL)
Table 46 Error Status
⎯
Text Based Report
ERRORL
Error Log Selection
Type
Error Handling
Product Rev
Syntax
<a_>ERRORL<b><b>...<b><b> (32 bits)
Aries 1.0
Units
b = enable bit
Range
Ø (disable) or 1 (enable)
Default
1111111111111111
Response
ERRORL: <*>ØØØØ_ØØØØ_ØØØØ_ØØØØ
bit 15
bit Ø
See Also
CERRLG, ERROR, TERRLG
Use the ERRORL command to choose the conditions that will be included in
the error log. When an error log bit is enabled (ERRORL11...11), the
operating system will respond to a specific execution error by making an
entry in the error log. Each bit corresponds to a different error condition (see
Table 47). To enable or disable a specific bit, the syntax is ERRORL=B.n-b,
whe
re “n” is the error bit number and “b” is either one (1) to enable or zero
(Ø) to disable.
Use the TERRLG command to view the error log. Use the CERRLG command
to clear the error log.