


















CANopen DSP 402 Implementation Guide
MAN-CAN402IG (Ver. 1.2)
83
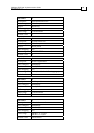
Controlword of Interpolated Position mode:
Name Value Description
0 Interpolated position mode is inactive. Enable ip mode
1 Interpolated position mode is active.
0 Execute the instruction of bit 4. Halt
1 Stop axle according to halt option code.
Notes:
If the interpolation is interrupted by setting bit 4 from 1 to 0, the drive stops at
quick stop deceleration (object 0x6085) and is treated similarly to axis halted. In this
case, the buffer is cleared; that is, the actual buffer size is the maximum buffer
size.
Setting bit 4 to 1 always starts the interpolation from the first data record. It is up
to the user to ensure consistency of the trajectory.
In case of a Halt, the drive stops the interpolation and stops the motor according
to object 0x605D. This case is treated similarly to interpolation interrupted
described previously.
In case the motor is stopped due to an internal fault or controlword command, the
interpolation is disabled, even if bit 4 is 1. Interpolation can be enabled again
only after the device enters the OPERATION_ENABLE state and bit 4 is set to 1.
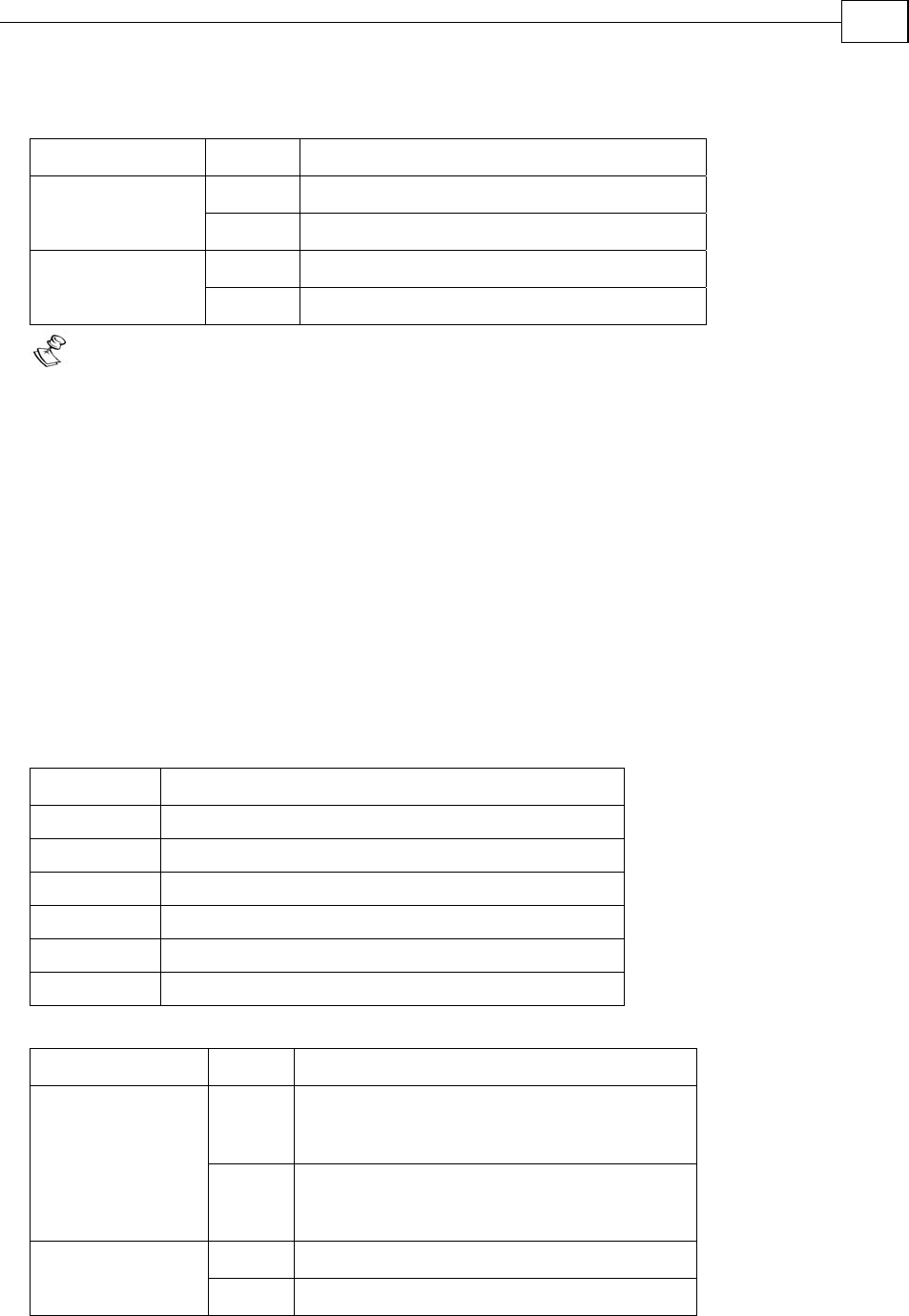
Statusword of Interpolated Position mode:
Bit Function
0…9 Described in Device Control
10 Target reached
11 Described in Device Control
12 Ip mode active.
13 Reserved
14…15 Described in Device Control
Name Value Description
0
Halt = 0: Position not reached.
Halt = 1: Axle decelerates.
Target reached
1
Halt = 0: Position reached.
Halt = 1: Velocity of axle is 0.
0 Interpolation mode not active. IP mode active
1 Interpolation mode active.
Setting bit 4 from 0 to 1 starts the interpolation from the first entry of the interpolation
buffer.