



















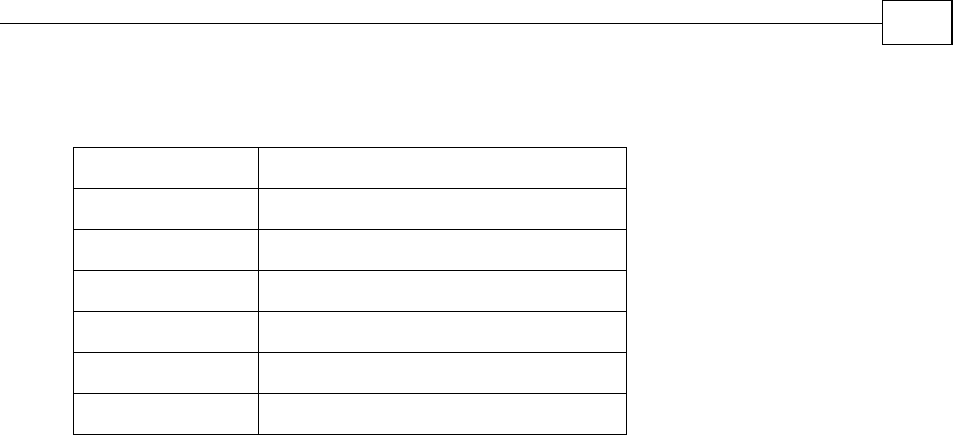
Data description:
Value Description
-32,768…-1 Manufacturer specific
0 Linear ramp (trapezoidal profile)
1 Not supported
2 Not supported
3 Not supported
4…32,767 Reserved
11.3 Functional Description
Two different means of applying target positions to a drive are supported by this device
profile:
Set of set-points:
After reaching the target position, the drive unit immediately processes the next target
position that results in a move in which the velocity of the drive is not normally
reduced to zero after achieving a set-point.
Single set-point:
After reaching the target position, the drive unit signals this status to a host computer
and then receives a new set-point. After reaching a target position, the velocity is
normally reduced to zero before starting a move to the next set-point.
The two modes are controlled by the timing of the bits “new set-point” and “change set
immediately” in the controlword, and “set-point acknowledge” in the statusword. These bits
allow a request-response mechanism to be set up in order to prepare a set of set-points
while another set is still being processed in the drive unit. This minimizes reaction times
within a control program on a host computer.
The Elmo drive introduces a buffered mode (bit 13 in the controlword), in which up to 16
subsequent profiled motions can be programmed. The programmed profiles are executed
when the previous motion is target reached. In buffered motion, set-point acknowledge
behaves in a manner similar to non-buffered mode, whereby the bit is reset when new
data can be buffered. Using change set immediately interrupts the buffered motion. In this
case, the buffer is reset and the last programmed motion is executed immediately.
The sequence of a set new point is:
1. The host sends the trajectory data and validates it by setting the new set point.
2. The Elmo drive acknowledges reception and buffering of the new data by setting
set-point acknowledge.
3. The host sends a command to start the first motion by resetting the new set point.
4. The motion begins. If the drive can accept more set points, the set-point acknowledge
resets.
CANopen DSP 402 Implementation Guide
MAN-CAN402IG (Ver. 1.2)
79