


















CANopen DSP 402 Implementation Guide
MAN-CAN402IG (Ver. 1.2)
102
The torque demand, torque actual value, current actual value may be available to the
user as parameters, if they are monitored.
Elmo’s SimplIQ drives support Profile Torque mode when selected. When Profile Torque
objects are set, some internal commands are affected. These internal commands remain
even after another operating mode is chosen. The following list shows the objects that are
affected, more information about these commands is available in the SimplIQ Command
Reference manual:
Max Torque [0x6072] : Set PL[1]
Max Current [0x6073] : Set PL[1]
Torque Demand Value [0x6074] : Reflect DV[1]
Motor Rated Current [0x6075] : Set CL[1]
Torque Actual Value [0x6077] : Reflect IQ
Current Actual Value [0x6078] : Reflect IQ
Notes:
Because DSP402 defines all relevant torque and current as relative to rate values,
motor current and motor torque are, herein, considered to be the same.
The following objects imitate each other and the last value entered is valid:
0x6072, 0x6073 for reference.
0x6077, 0x6078 for feedback.
14.1.1 Internal states
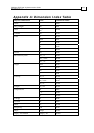
Controlword of profile torque mode
Bit Function
0…3 Described in Device Control
4…6 Reserved
7 Described in Device Control
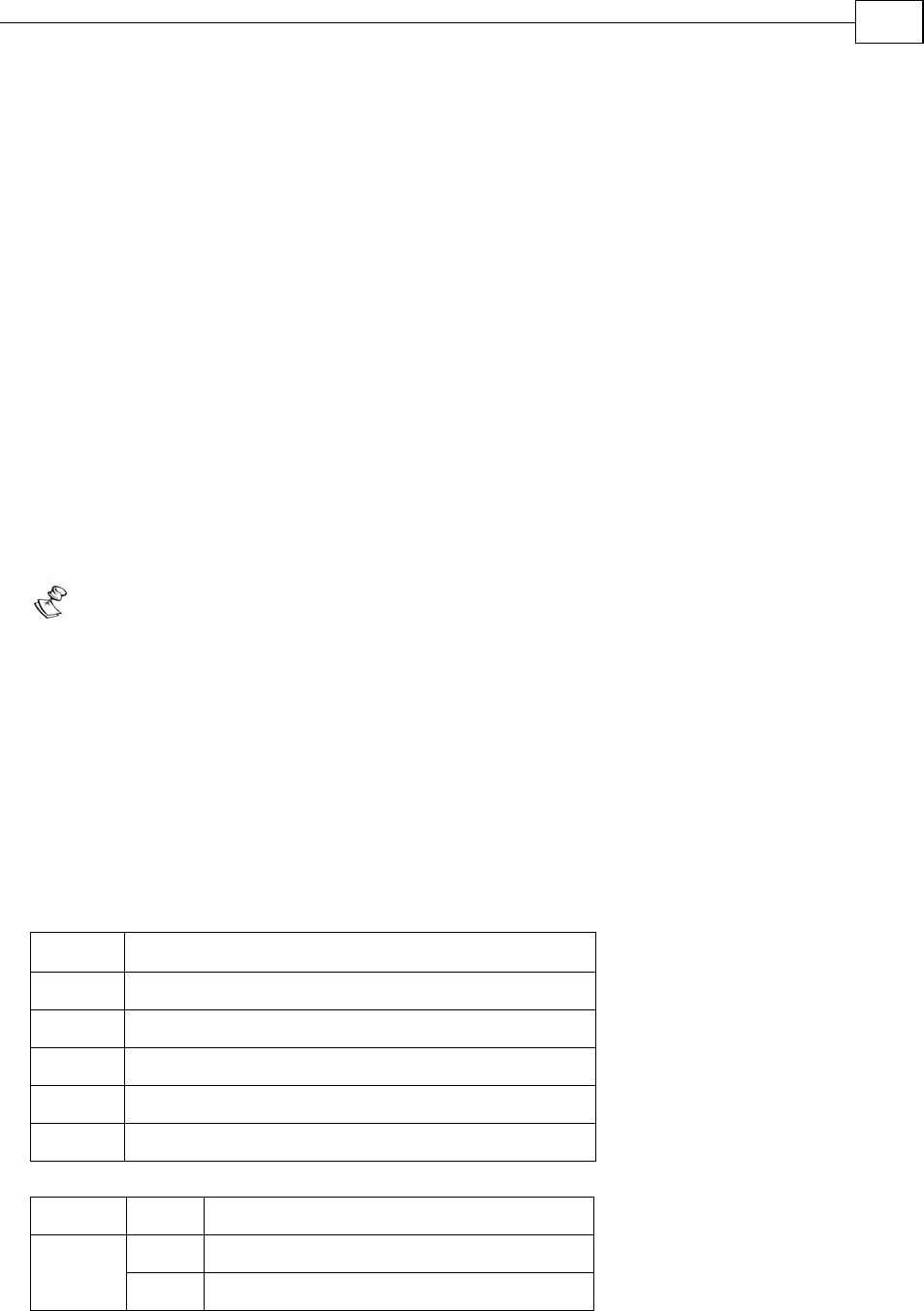
8 Halt
9…15 Described in Device Control
Name Value Description
0 Execute the motion. Halt
1 Stop axle.