


















CANopen DSP 402 Implementation Guide
MAN-CAN402IG (Ver. 1.2)
28
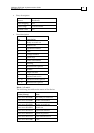
Bits 4, 5, 6 and 8:
These bits are operation-mode specific. Their description is found in the chapter
about the special mode.
Operation Mode
Bit
Velocity
Mode
Profile
Position
Mode
Profile
Velocity
Mode
Profile
Torque
Mode
Homing
Mode
Interpolation
Position
Mode
4 rfg enable New set-point Reserved Reserved Homing
operation
start
Enable ip
mode
5 rfg unlock Change set
immediately
Reserved Reserved Reserved Reserved
6 rfg use ref abs/rel Reserved Reserved Reserved Reserved
8 Halt Halt Halt Halt Halt Halt
Not all modes mentioned in the table are implemented in Elmo servo drives.
Bits 9 and 10:
These bits are reserved for future use. They are de-activated by setting them to 0. If
they have no special function, they are set to zero.
Bits 11, 12, 13, 14 and 15:
These bits are manufacturer specific.
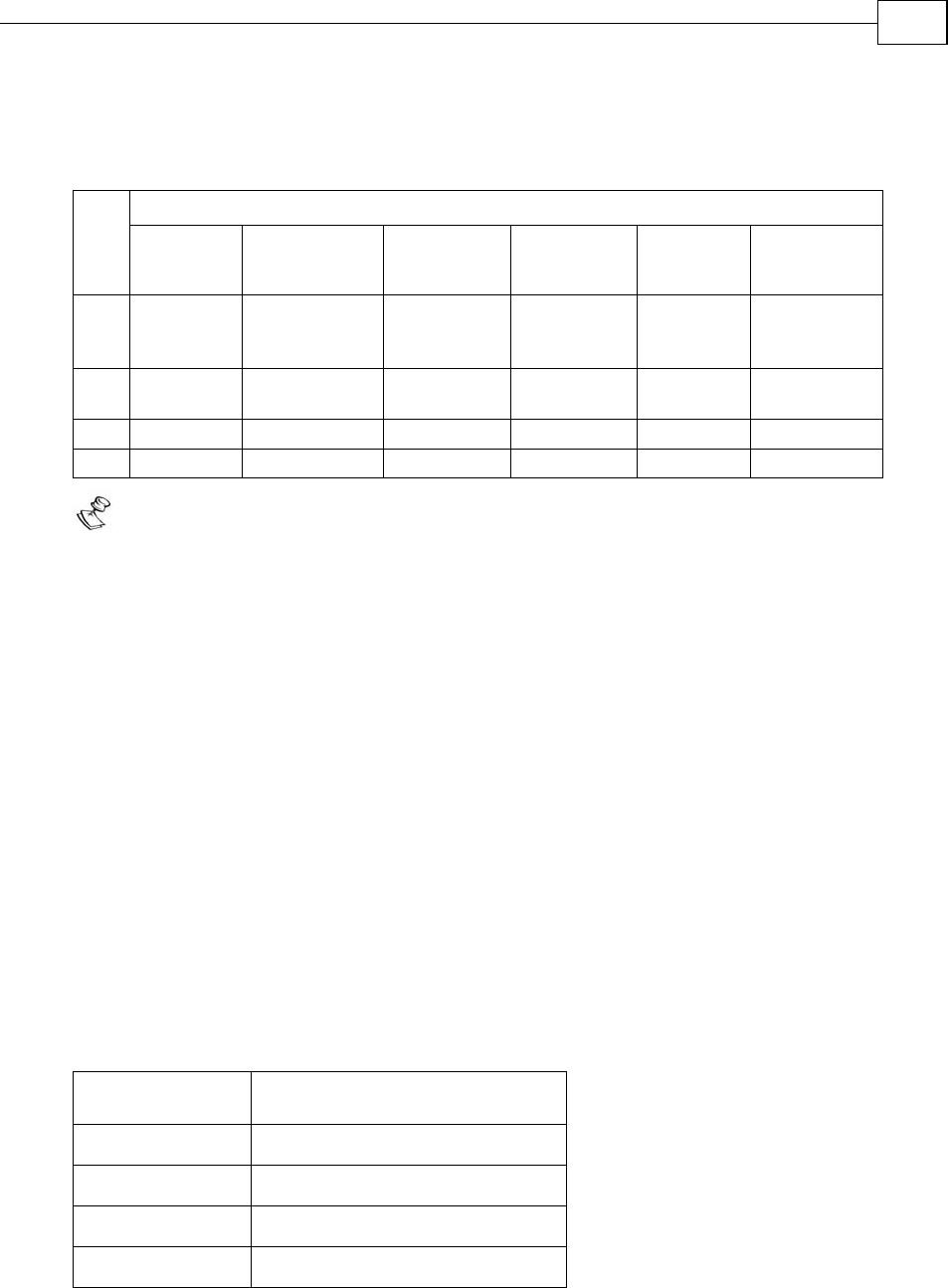
Object 0x6041: Statusword
The statusword indicates the present state of the drive. No bits are latched. The statusword
contains bits for:
The current drive state
The operating state of the mode
Manufacturer-specific options
Object description:
Index 6041h
Name Statusword
Object code VAR
Data type UNSIGNED16
Category Mandatory