





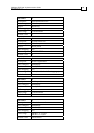













Controlword of the profiled velocity mode:
Bit Function
0…3 Described in Device Control
4… Reserved
7 Described in Device Control
8 Halt
9…15 Described in Device Control
14..15 Described in Device Control
Name Value Description
0 Execute the motion. Halt
1 Stop axle.
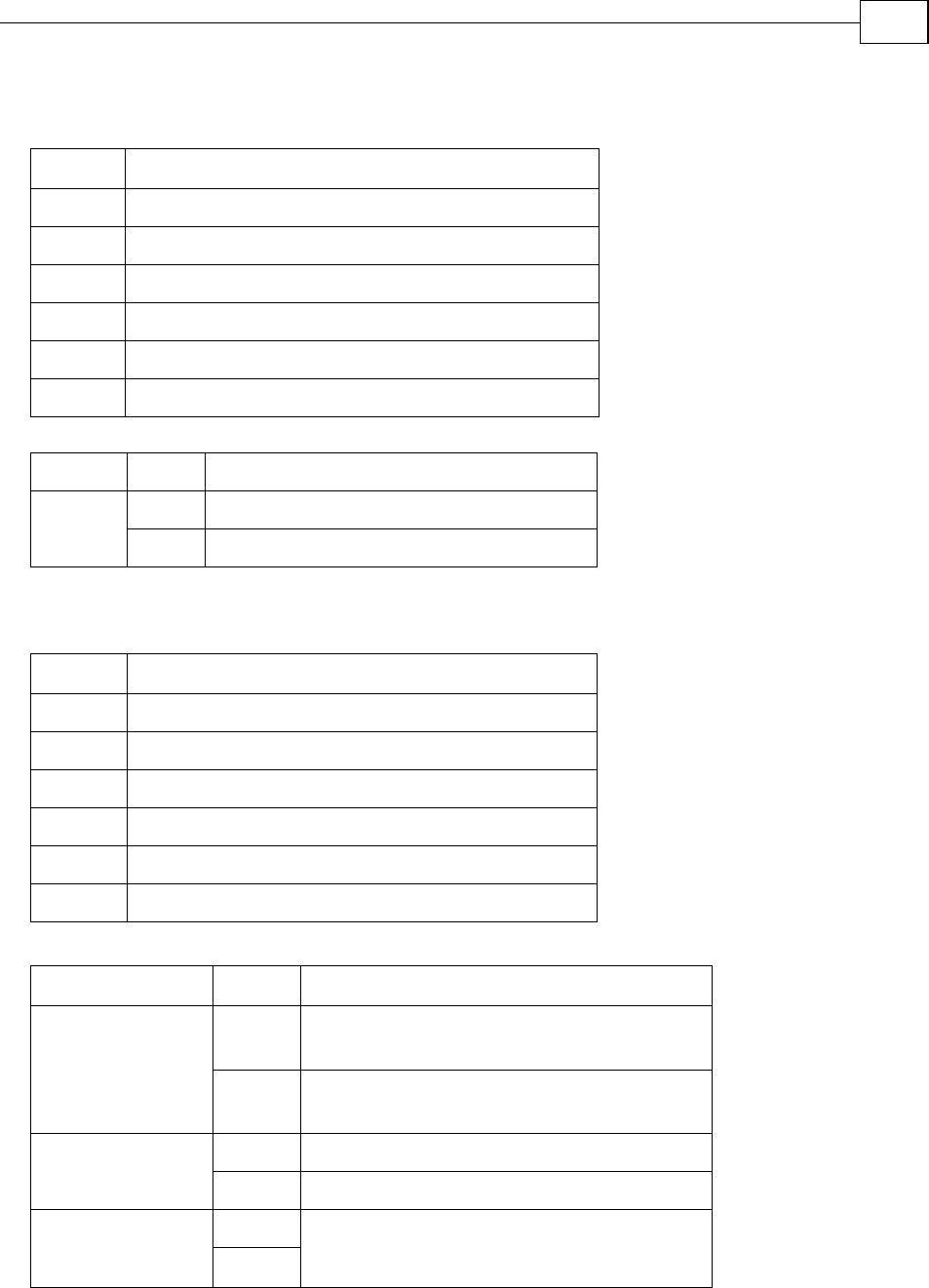
Statusword of the profiled velocity mode:
Bit Function
0…9 Described in Device Control
10 Target reached
11 Described in Device Control
12 Speed
13 Maximum slippage (not implemented)
14…15 Described in Device Control
Name Value Description
0 Halt = 0: Target velocity not (yet) reached.
Halt = 1: Axle decelerates.
Target reached
1 Halt = 0: Target velocity reached.
Halt = 1: Velocity of axle is 0.
0 Speed not equal to 0. Set new point
acknowledge
1 Speed equals 0.
0 Max slippage
error
1
Not implemented.
CANopen DSP 402 Implementation Guide
MAN-CAN402IG (Ver. 1.2)
95