
















Pro Sweep Hydraulic SystemPage 3 -- 9
Brush Circuit
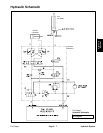
NOTE: Hydraulic flow and relief pressure for the Pro
Sweep are determined by the tow vehicle.
When the tow vehicle hydraulics are engaged for the
sweeper, hydraulic flow from the tow vehicle goes to the
sweeper control manifold (port P) through the hydraulic
inlet hose. If the sweeper brush motor is not engaged
(sweeper is raised above the transport height) and the
lift and offset cylinders are stationary, hydraulic flow
from the tow vehicle is directed by the control manifold
pressure compensator valve EC and the de--energized
solenoid valve SRV to return to the tow vehicle through
control manifold port T and the return to tank hose (Fig.
9).
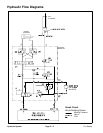
Brush Engage
When the sweeper is below the transport height, sole-
noid valve SRV in the hydraulic control manifold is ener-
gized. In this sweeper position, energized SRV shifts to
prevent hydraulic flowreturn to the tow vehicle when the
tow vehicle hydraulicsare engaged.Hydraulic flow from
the tow vehicle is then directed out of control manifold
port M1 to the brush motor. This flow causes rotation of
the sweeper brush. Oil return from the brush motor is
routed to control manifold port M2, out control manifold
port T and returns to the tow vehicle.
During sweeper brush operation, solenoid valve SRV
also functions as a circuit relief valve. If brush circuit
pressure reaches 2500 PSI (172 bar), SRV will shift to
reduce circuit pressure.
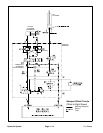
Brush Disengage
The brush can be disengaged either by shutting off hy-
draulic flow fromthetow vehicle or byraising the sweep-
er to the transport position.
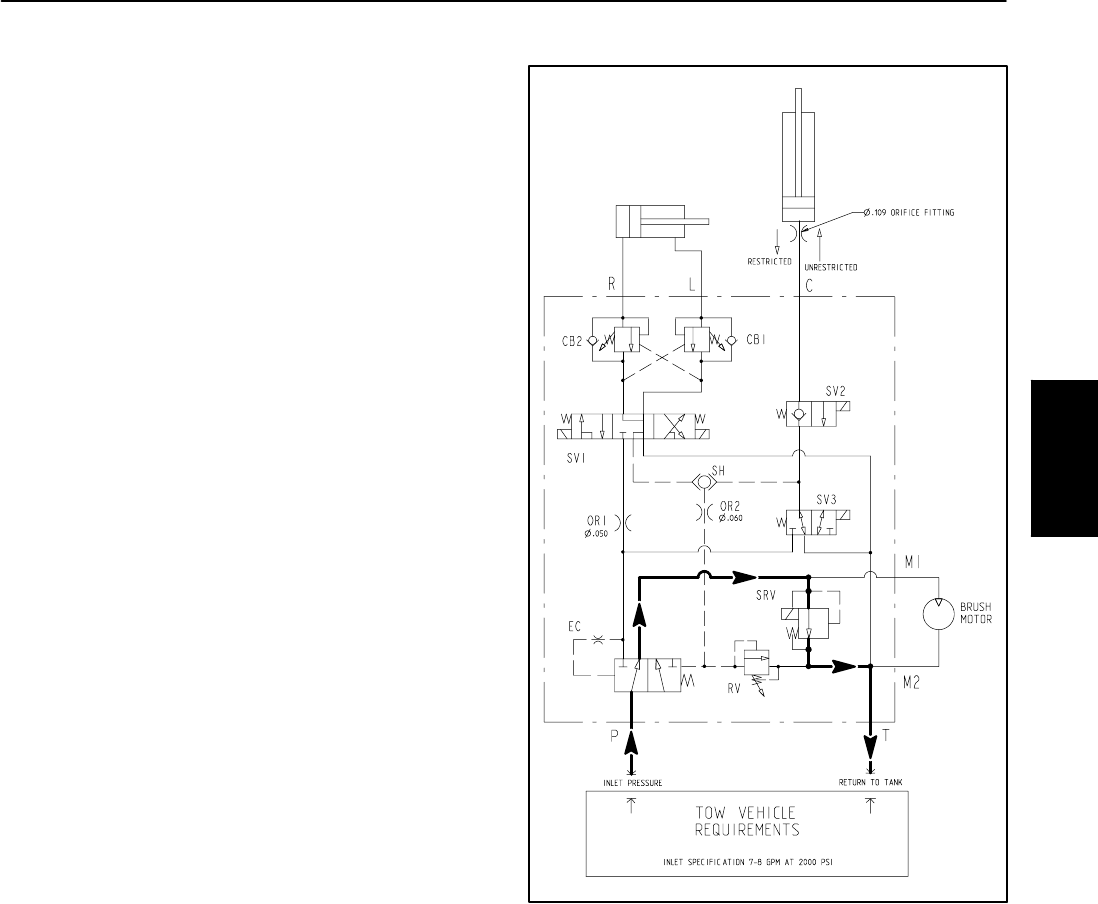
Figure 9
CONTROL
MANIFOLD
LIFT
CYLINDER
OFFSET
CYLINDER
(DE--ENERGIZED)
Hydraulic
System