



















Chapter 3 Building System Connections
Xmath Control Design Module 3-4 ni.com
Linear System Interconnection Functions
afeedback( ), append( ), connect( ), and feedback( ) connect
dynamic systems in state–space or transfer–function form to produce a
larger system in state-space form. The following restrictions apply to all
of these functions:
• Both systems must have the same sample rate.
• Improper dynamic systems (systems with more zeros than poles) are
not allowed.
• If the systems to be connected are in transfer-function form, they must
be expressed in the same dependent variable.
In describing the algorithms used in these connection functions, we will
often refer to the component matrices of a state-space system
Sys
1
as A
1
,
B
1
, C
1
, and D
1
.
afeedback( )
Sys = afeedback(Sys1,{Sys2})
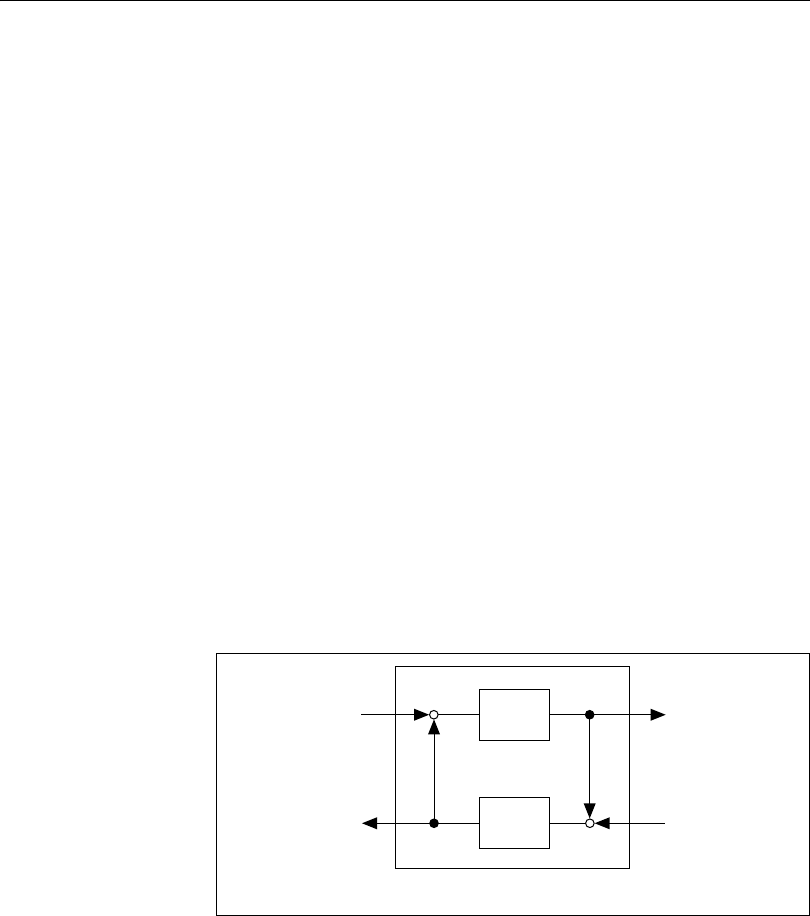
The afeedback( ) function connects two dynamic systems in a feedback
loop, and obtains a single system representation for the complex loop.
Sys is organized as shown in Figure 3-1. Additional external inputs to the
feedback path are included with outputs from the feedforward path.
Figure 3-1 illustrates that outputs of the feedback path system are included
with forward path outputs
. For an example of how to use afeedback( ),
refer to Example 3-1.
Figure 3-1. afeedback System Configuration
e
1
e
2
u
1
u
2
y
1
y
2
Sys
1
Sys
+
+
+
–
Sys
2