



















Chapter 1 Introduction
Xmath Control Design Module 1-18 ni.com
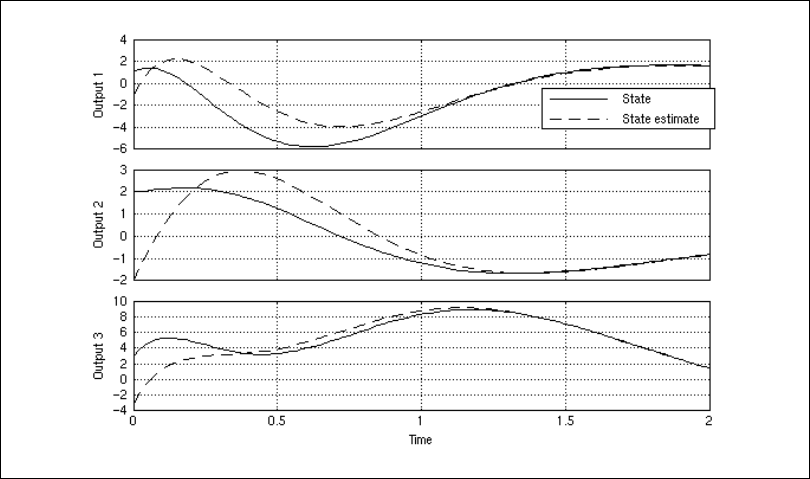
Figure 1-10. Multiple Plots Showing Time Needed for States to be Correctly Tracked
by Estimator, Given Incorrect Initial Values
Helicopter Hover Problem: Discrete Formulation
Discrete-time control systems are most frequently designed in one of
two ways: either directly implemented in the discrete domain, or first
solved as continuous problems—often deriving directly from differential
equations of motion—and then discretized. Here you take the second
approach with the problem solved in the Helicopter Hover Problem: State
Feedback and Observer Design section.
A guideline for choosing a sample rate for a system to be discretized is that
it be significantly less than the smallest time constant of the continuous
system divided by π.
Look at the open-loop pole magnitudes of your original open-loop
continuous-time system
ssys:
max(abs(ol_poles))
ans (a scalar) = 0.656513