



















Document: LT0273 MX4428 MXP Engineering / Technical Manual
Device Processing
Issue 1.5 24 March 2006 Page 9-17
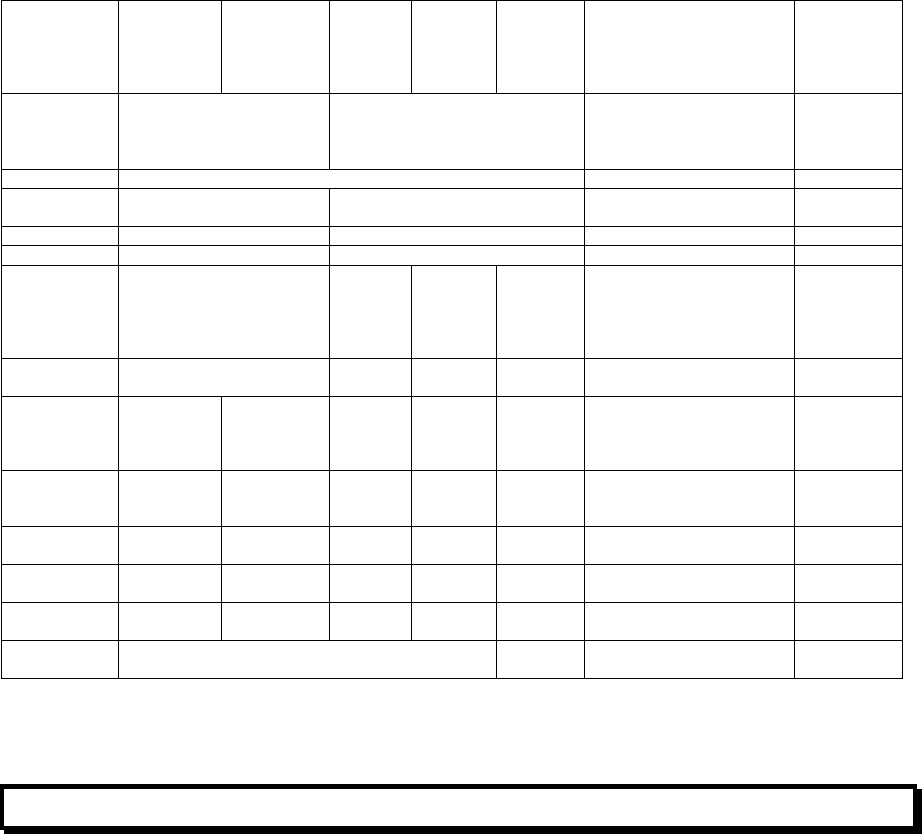
AutoReset Commission
Mode
Zone
Alarm
Test
System
test.
Auto test
with test
fire
Fast
Point
Test
Slow Point Test Normal
Detector test
applied
No
Yes on smoke / CO
(Alarm result simulated on 8xxH
ie Heat only detector and on
ancillary input modules)
Yes on smoke / CO.
Simulated 100°C on 8xxH.
Simulated alarm on
ancillaries.
No
FastLogic Switches to SmartSense As cfgd As cfgd
Filter Divisor
2 on Smoke / CO
As cfgd on heat
1 (bypassed) As cfgd As cfgd
Enhancement None None None As cfgd
Step Limit Bypassed Bypassed As cfgd As cfgd
AVF Bypassed
As cfgd
on DIM.
Bypassed
on analog
detectors
N/A Bypassed As cfgd As cfgd
Detector / Anc
LED operates
Yes No No Yes Yes Yes
Circuit / zone
goes into
alarm
Yes - but
zone
isolated at
FIP
Yes
When
ALL
points in
alarm
No Yes Yes
When alarm
condition
reached
Point alarm
generates
event
Yes Yes No No Yes Yes Yes
History high,
low updated
No Yes No No No No Yes
Tracking
updated
No Yes No No No No Yes
FIP CV
Updated
Yes Yes No No No Yes Yes
Reset
terminates test
No effect at MXP Yes Yes N/A
Table 9-1 Test Modes Summary
9.22 ANCILLARY FILTERING
If a poll returns the alarm state, then up to 5 immediate re-polls are made. If all these are still
in the alarm state then an alarm is generated. If one of the succeeding polls is not in the
alarm state, then immediate re-polling stops, but an up-down counter will be retained for the
next poll. This counter counts up when an alarm condition is measured, and down when a
non-alarm condition is measured. So if there are 5 polls in the alarm state then 1 non alarm
the counter will be left at 4. On the next scheduled poll the counter starts from the value it
had previously, so only 2 successive polls returning the alarm condition will be required to
reach the alarm condition.
The up-down counter always counts up and down (between 0 and 6) depending on whether
an alarm condition or not is read from the detector. When the counter reaches 6 a filtered
alarm state is generated. When the counter reaches 0 a filtered non-alarm condition is
determined. An immediate re-poll is done if the last poll is in the opposite state to the filtered
state.
Ancillary faults are filtered in the same way, except that only 4 polls are needed rather than
6, and there is no immediate re-polling, 4 polls 5 seconds apart are required.