



















3 - 5
3 DESIGN
POINT
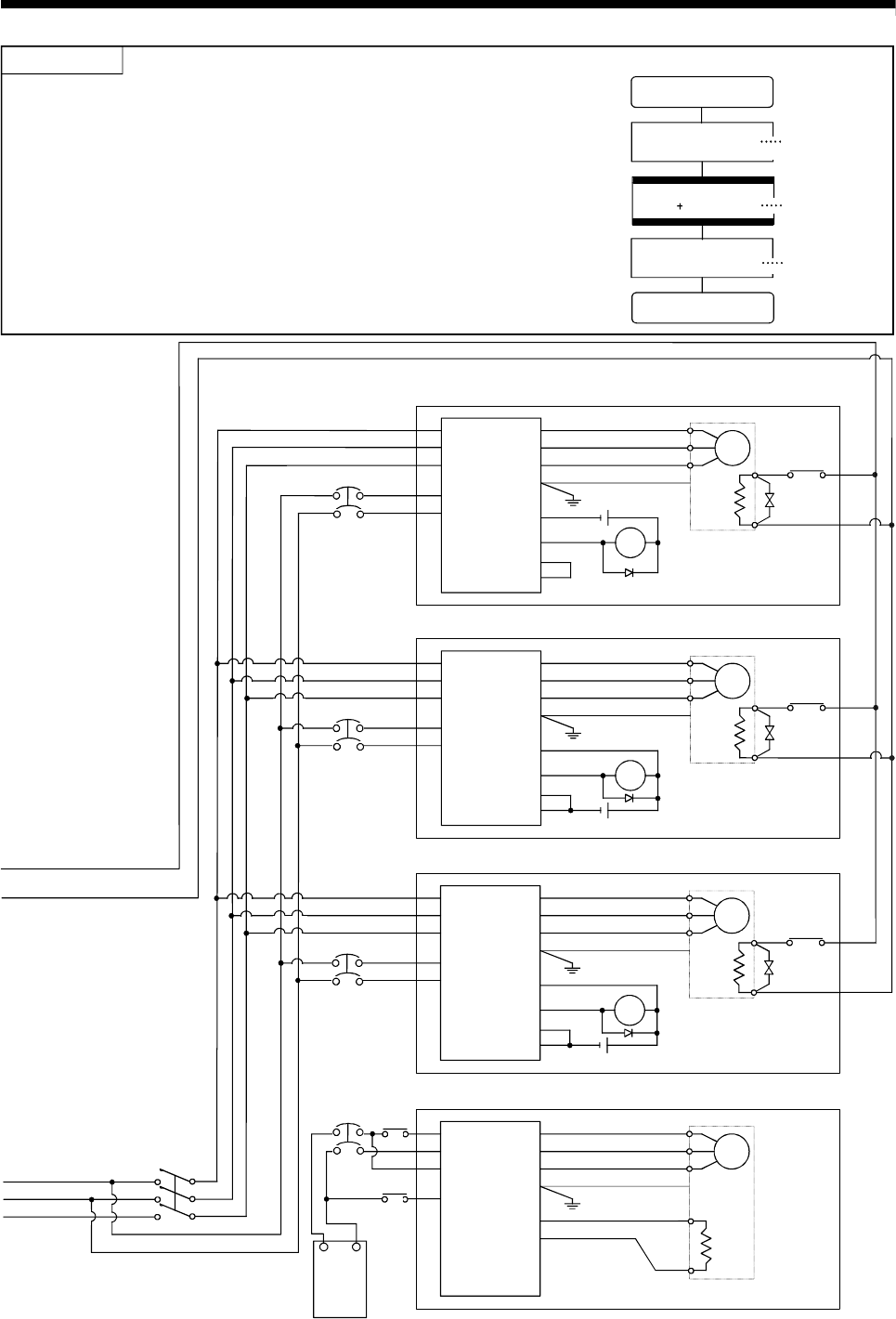
1) (Note-1) : The following is the Motion SFC program example.
< Example> For control axis 1 and axis 2
[F 1]
SET PYm
[G 1]
M2408 M2428
Servo error detection
[F 2]
RST PYm
END
4) (Note-4) : It recommends using one leakage breaker for one servo amplifier. When electric
power is supplied to multiple servo amplifiers for one leakage breaker, select the
wire connected to the servo amplifier according to the capacity of the leakage
breaker.
2) (Note-2) : It is also possible to use a full wave rectified power supply as the power
supply for the electromagnetic brake.
PYm ON with initial
(ON : normal)
Servo error detection of
the axis 1, axis 2.
OFF : abnormal(error)
3) (Note-3) : It is also possible to use forced stop signal of the servo amplifier.
6) Refer to Section 2.4.9 (4) for the connection of SSCNET cable and terminal connector.
5) (Note-5) : Only the point has described the servo amplifier MR-J2M-B.
Refer to "MR-J2M-B Servo amplifier Instruction Manual" for details.
MC
Ra3
SM
U
V
W
U
V
W
L1
L2
L3
L11
L21
MR-J2-B/
MR-J2S-B
COM
MBR
EM1
SG
24VDC
Ra3
CP5
(Note-3)
Circuit example when using MR-J2-B/MR-J2S-B
Ground
Electro-
magnetic
brake
(Note-2)
(Note-4)
(Note-4)
(Note-3)
MR-H-BN
Ra2
24VDC
U
V
W
R
S
T
R1
S1
COM
MBR
EM1
EM2
Ra2
Ground
SM
U
V
W
Electro-
magnetic
brake
(Note-2)
CP4
Circuit example when using MR-H-BN
(Note-4)
(Note-4)
Ra4
SM
U
V
W
U
V
W
L1
L2
L3
L11
L21
MR-J2M-B
VIN
MBR
EM1
SG
24VDC
Ra4
CP6
(Note-3)
Circuit example when using MR-J2M-B
Electro-
magnetic
brake
(Note-2)
Ground
(Note-4)
(Note-4)
(Note-5)
SM
U
V
W
U
V
W
E
P24M
P24G
P24L
MR-J2-03B5
B1
B2
EM1
CP7
+24V
24G
24VDC
Power
supply
MC
Ra1
Circuit example when using MR-J2-03B5
Electro-
magnetic
brake
(Note-2)
Ground