



















MODEL 54eA SECTION 14.0
CALIBRATION - CONTROL
6. When sufficient data have been collected, return
the output signal to its original value using the sim-
ulate test function. Maintain the controller in this
manual mode until you are ready to initiate auto-
matic PID control, after you have calculated the
tuning constants.
Once these steps are completed, the resulting process
reaction curve is used to obtain information about the
overall dynamics of the system. It will be used to cal-
culate the needed tuning parameters of the Model
54eA controller.
NOTE
The tuning procedure outlined below is
adapted from "Instrumentation and
Process Measurement and Control",
by Norman A. Anderson, Chilton Co.,
Radnor, Pennsylvania, ©1980.
Information derived from the process reaction curve
will be used with the following empirical formulas to
predict the optimum settings for proportional and inte-
gral tuning parameters.
Four quantities are determined from the process reac-
tion curve for use in the formulas: time delay (D), time
period (L), a ratio of these two (R), and plant gain (C).
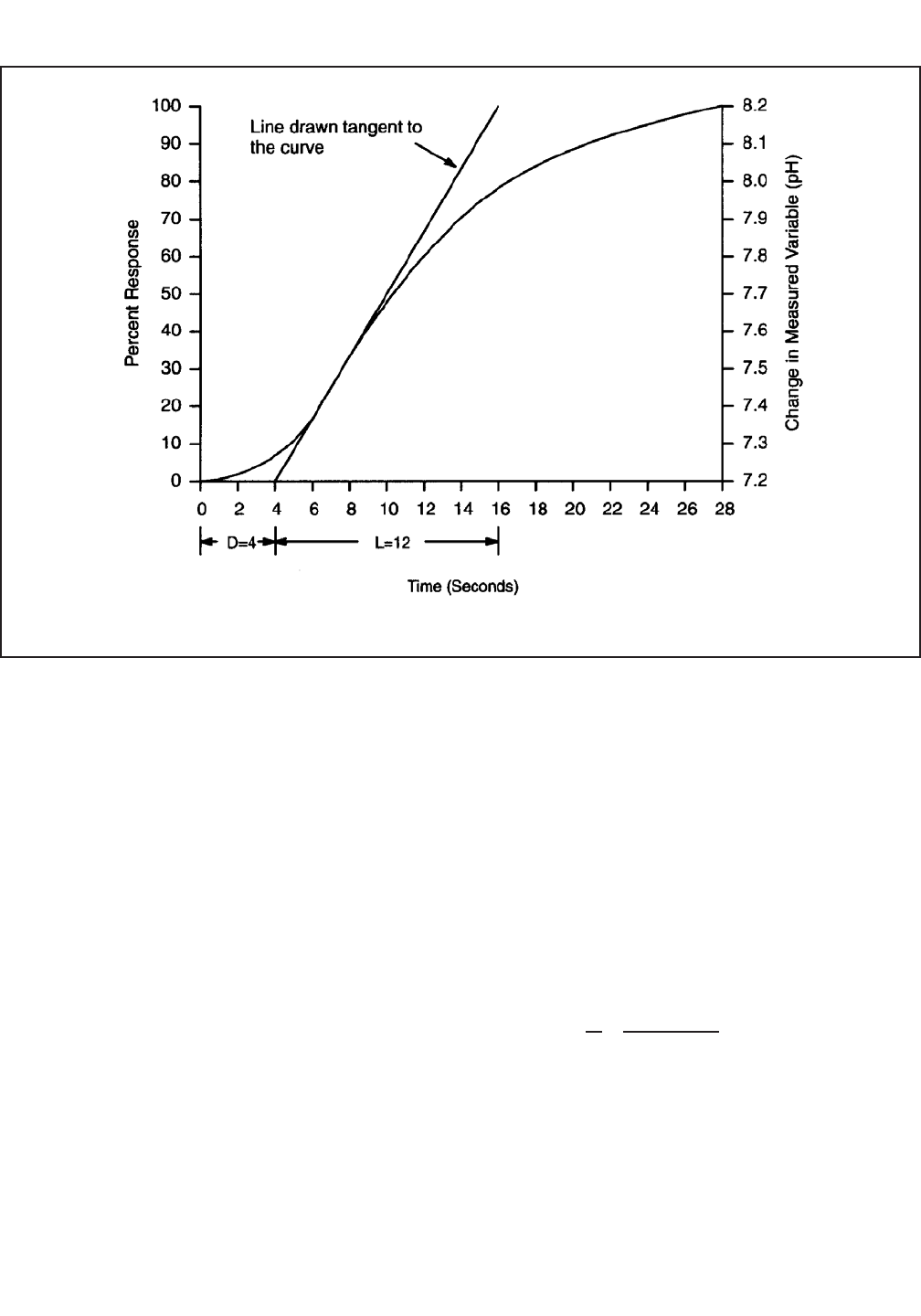
A line is drawn on the process reaction curve tangent
to the curve at point of maximum rise (slope) as shown
in Figure 14-1. The Time Delay (D), or lag time,
extends from "zero time" on the horizontal axis to the
point where the tangent line intersects the time axis.
The Response Time period (L), extends from the end
of delay period to the time at which the tangent line
intersects the 100% reaction completion line repre-
senting the process stabilization value. The ratio (R) of
the Response Time period to the Time Delay describes
the dynamic behavior of the system.
In the example, the process Delay Time (D) was four
seconds and the Response Time period (L) was 12
seconds, so:
R = = 3
The last parameter used in the equations is a plant
gain (C). The plant gain is defined as a percent
change in the controlled variable divided by the per-
cent change in manipulated variable; in other words,
the change in the measured variable (pH, conductivi-
ty, temperature) divided by the percent change in the
analog output signal.
The percent change in the controlled variable is
defined as the change in the measured variable (pH,
FIGURE 14-1. The Process Reaction Curve
12 seconds
4 seconds
L
D
81